Universität Duisburg-Essen
Lehrstuhl für Mechatronik
Orientierung
Kontakt
(Du) +49 (0)203 379-2199
(Du) +49 (0)203 379-4494
(Du) patrizia.fichera@uni-due.de
Suchen
A-Z
DE
English
Studieren an der UDE
Social Media
Navigation
Home
Lehre/Studium
Lehre/Studium
Lehrveranstaltungen
Bachelor- und Masterarbeiten
Master „Automotive Engineering & Management Executive“
Forschung
Forschung
Lehrstuhlschwerpunkte
Mobilität
Robotik
Fakultätsschwerpunkte
Preise
Abgeschlossene Projekte
Publikationen
Veranstaltungen
Transfer
News/Presse
Team
Organisation
Anreise
Stellenausschreibungen
Robotik
Lehrstuhl für Mechatronik
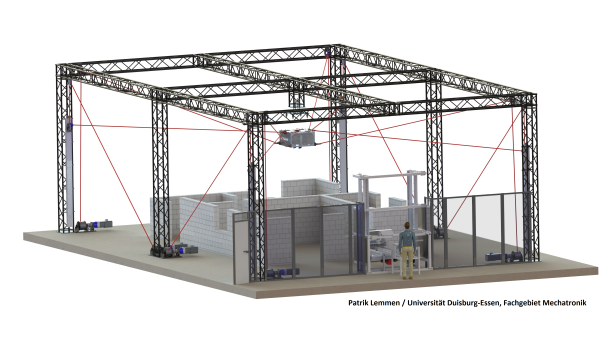
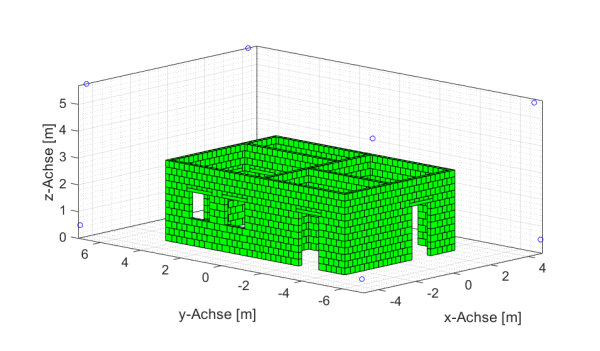
Entwicklung von Seilrobotern für die Erstellung von Kalksandstein-Mauerwerk auf der Baustelle
Mehr lesen
3D-Druck aus Beton
Mehr lesen
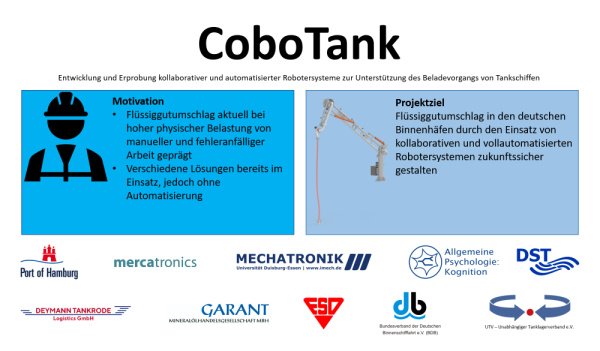
CoboTank – Entwicklung und Erprobung kollaborativer und automatisierter Robotersysteme zur Unterstützung des Beladevorgangs von Tankschiffen
Mehr lesen