Berechnung der Schleppkräfte
Status
abgeschlossen
Beteiligte Wissenschaftler
Prof. Dr.-Ing. Bettar Ould el Moctar
Simon Lange, M. Sc.
Projektbeschreibung
Im Rahmen der Evaluierung des deutschen Notschleppkonzeptes des Havariekommandos des Bundes und der Küstenländer soll die notwendige Leistung von Notschleppern ermittelt werden. Das Havariekommando hat repräsentative Bemessungsschiffe (Containerschiffe, Tanker, Autotransporter, RoRo-Fähre) und Umgebungsbedingungen (Nord- und Ostsee) definiert.
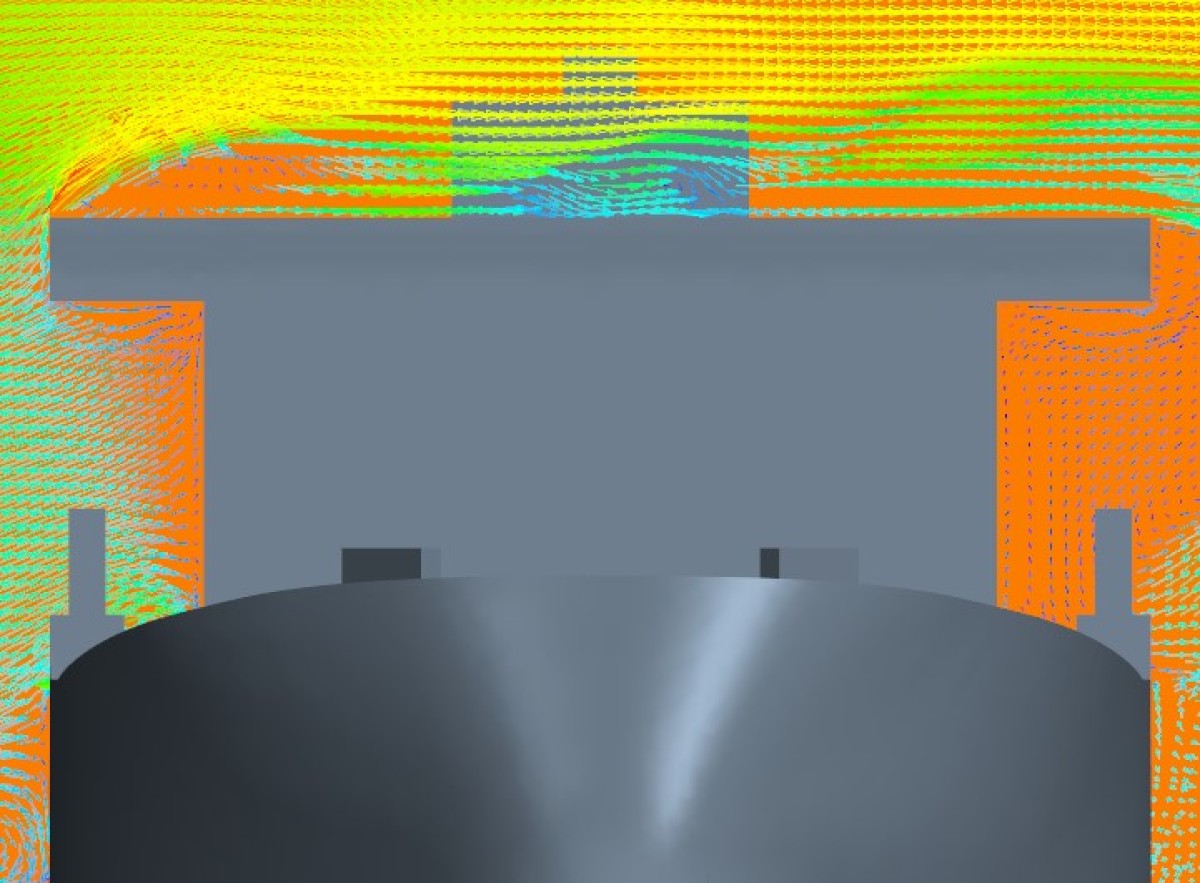
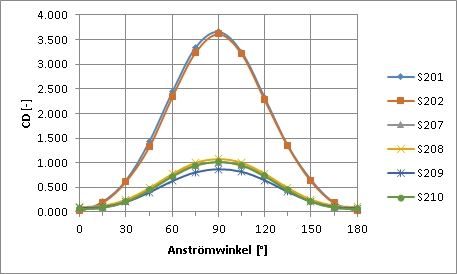
Ausgehend davon haben die Universität Duisburg-Essen und die Klassifikationsgesellschaft DNV GL SE die Schiffslinien (Überwasser- und Unterwasserschiffsform) erstellt und systematische Berechnungen der wellen-, wind- und strömungsinduzierten Kräfte und Momente für verschiedene Begegnungswinkel durchgeführt (Beispiel in Abbildung 1). Zwecks Validierung der numerischen Verfahren zur Berechnung der Kräfte und Momente wurden publizierte sowie aus eigenen Forschungsprojekten vorhandene Messdaten herangezogen.
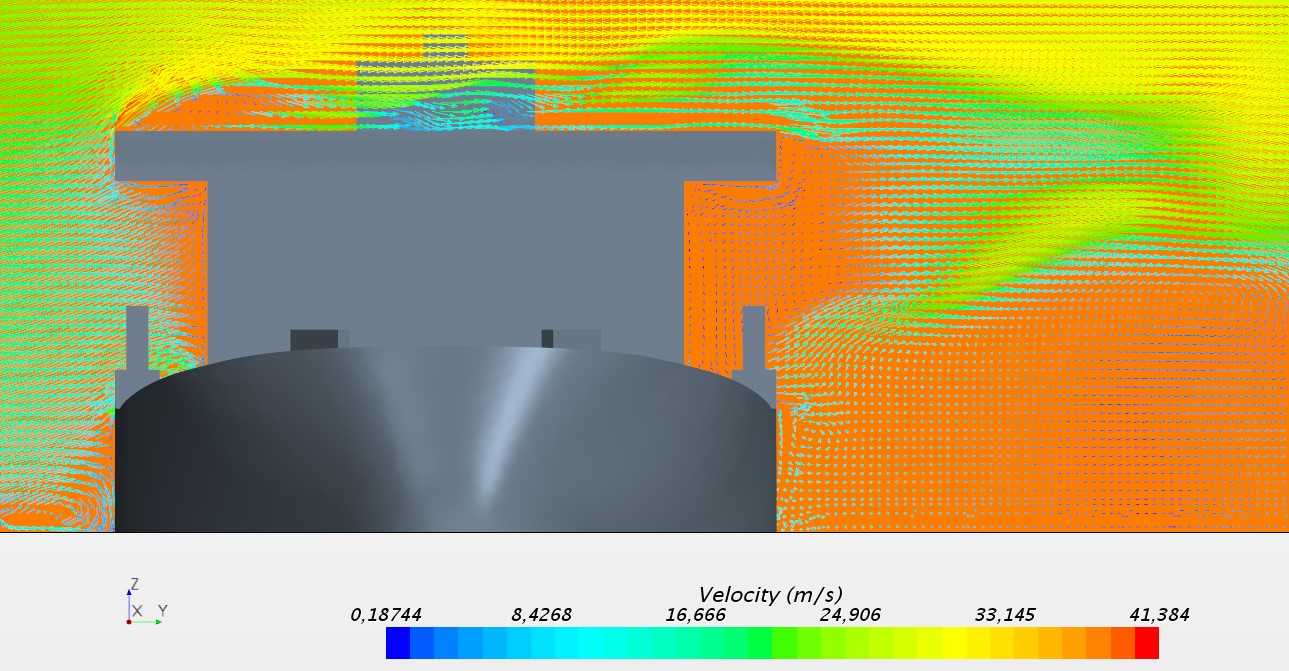
Abbildung 1: Umströmung eines Suezmax-Tankers bei Wind quer zum Schiff
Basierend darauf wurde die notwendige Schleppkraft zum Halten der Position des jeweiligen Bemessungsschiffes gegen Wellen, Strömung und Wind mittels Lösen der Gleichgewichtsbedingungen berechnet. Die Schleppkräfte beziehen sich nur auf das ausgefallene Schiff und variieren abhängig vom Bemessungsschiff und Umgebungsbedingungen zwischen 17 und 95 Tonnen.
{kind=link}
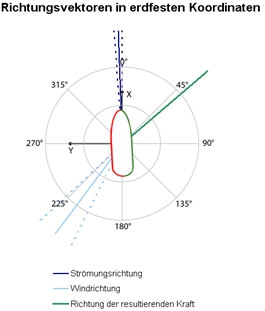
Da die Anfangsbedingungen das Schleppmanöver beeinflussen, wurden die Driftgeschwindigkeiten und der Gierwinkel (Kompasskurs) der driftenden Bemessungsschiffe vor dem Schleppvorgang durch Lösen der nichtlinearen Bewegungsgleichungen berechnet. Abhängig vom Bemessungsschiff und den Umgebungsbedingungen liegen die Driftgeschwindigkeiten zwischen 3 und 6 Knoten. Der Gierwinkel (definiert als der Winkel zwischen der Seegangsrichtung und der Schiffslängsachse) liegt bei dem stationären Abdriften zwischen 97° und 113°.
Schließlich wurde, ausgehend von den Anfangsbedingungen, der Schleppvorgang durch die Lösung der nichtlinearen Bewegungsgleichungen simuliert. Die Bahnkurve und die Stoppzeit für die Bemessungsschiffe wurden in Abhängigkeit von der Schleppkraft berechnet (Beispiel in Abbildung 2). Die letztgenannte wurde zwischen 25 Tonnen (t) und 200 t in 25 t-Schritten variiert. Dabei wurden zwei Szenarien für den Schleppvorgang simuliert. Bei dem ersten Szenario wurde das treibende Bemessungsschiff in Schifflängsrichtung geschleppt. Bei dem zweiten Szenario wurde es 30° schräg nach vorne gezogen. Es hat sich gezeigt, dass der zweite Schleppvorgang nur in solchen Fällen vorteilhaft ist, wenn die Stoppdistanz und -zeit auch mit dem ersten Vorgang gering sind; in anderen Fällen bringt der zweite Schleppvorgang keine Vorteile.
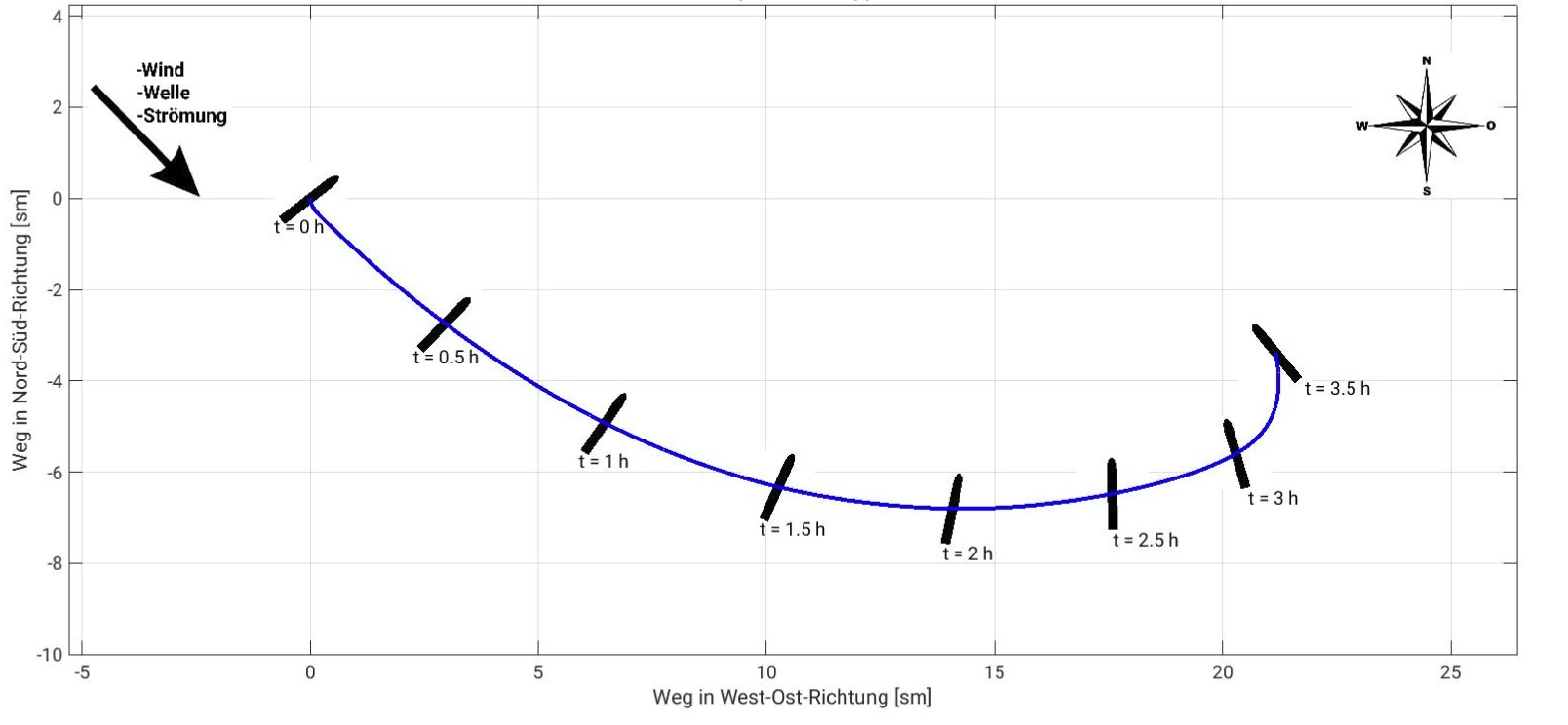
Abbildung 2: Bahn eines mit 100 t Zugkraft geschleppten Autotransporters
Abhängig von der Schleppkraft, dem Bemessungsschiff und den Umgebungsbedingungen variieren der Stoppweg und die Stoppzeit von 1,7 bis 77 Seemeilen bzw. von 0,7 bis 21 Stunden. In manchen Fällen – große Schiffe und kleine Schleppkraft – war es nicht möglich, das havarierte Schiff während der verwendeten Simulationszeit zu stoppen.
Weblinks
{kind=link}
{kind=link}
![]() Auftraggeber des Projekts - https://www.havariekommando.de/
Auftraggeber des Projekts - https://www.havariekommando.de/
 Projektpartner - https://www.dnvgl.de/
Projektpartner - https://www.dnvgl.de/