Student Projects
The projects listed below are open to both Bachelor and Master students.
Outstanding students may be offered opportunities leading to journal publications.
For further information, please contact khadijeh.mohri [at] uni-due.de.
2402: Wildfires: 3D Optical Diagnostics to Understand the Good and BadThe occurrence of wildfires, which has increased globally, is a threat to life, the environment, business, economy and more. From the onset of respiratory disease, to loss of revenue, supply chain and tourism, the potential negative impact on the ecosystem and landscape, many pressing issues call for intensified research on wildfires. In depth understanding of wildfire behaviour aids in developing techniques for risk management, prevention and control of the fire. The interest is not only related to prevention or minimisation of the consequences through measures like fire risk mapping, early warning and evacuation, but also in exploitation of prescribed burning for forest management strategies such as removal of excess forest debris and fuel or reduction of insect infestations, promotion of seed germination as needed for some species and increased robustness of the ecosystem. In this project, the aim is to deploy 3D tomographic imaging based on multi-spectral multi-simultaneous measurements to explore the onset conditions and behaviour of wildfires. The flame propagation rate, spatial distribution and structures of the hot gas and generation of 3D validation datasets for advanced numerical simulations in this area of research are amongst the goals. The existing multi-camera (total of 43) / multi optical filter setup of the tomography group and existing tomographic algorithms are to be used. The candidate should have past experience with experimental setups, preferably consisting of cameras and optics, and sound programming skills.
|
Multi-camera setup for tomographic imaging of an anticipated laboratory wildfire setup. |
2400: A beam-bending H2 flame detectorThe detection of Hydrogen flames is a prerequisite for safety considerations in the ever-growing hydrogen (H2) energy systems. Its nearly invisible pale blue colour, especially in daylight, and low radiant heat that is usually only detectable very close to the flame, call for a reliable detection system to aid in effective safety control features such as shut-down, alarm activation, ventilation activation (when needed) and so on. In this project, the concept of beam bending that is similar to the schlieren or background oriented schlieren (BOS) methods is to be utilised for the design of an optical detection system. The changes in refractive index within a reacting gas (flame) will bend light rays. The deflection of the light rays can be measured either by imaging a background pattern behind the combusting flow, or by aligning a light emitter and detector on opposite sides of the volume of interest. In the first phase, a weak laser pointer (low enough energy to prevent damage to the sensor) and a surveillance camera will be positioned around a flame for measurements to test the concept. Additionally, the existing BOS method of the group will be utilised to measure deflections on a background pattern behind the flame using a second camera. The two methods should be tested in terms of applicability and sensitivity. The candidate must have a good grasp of MATLAB and the capability to perform optical experiments in the lab. Additionally, C programming experience is considered advantageous. The results of this work can potentially be published in a peer-reviewed journal with international recognition.
|
 Light beam deflection due to varying refractive index in a reacting flow. |
2000: Analysis of the manufacturing process in laser power-bed fusion of metals using background-oriented schlieren (BOS) imagingLaser powder-bed fusion Laser powder-bed fusion is an additive manufacturing process that is used for 3D printing of metals. A focused laser beam fuses particulate materials, layer by layer to form the 3D object. The consistency and quality of the final product is influenced by several factors including airborne particles, fumes and metallic vapours in close vicinity of the processing region, which possesses short length and time scale variations. Therefore, a high-speed camera with sufficient sensor resolution has been purchased for the diagnostics. Project description In this project, high-speed imaging of the density gradients in the gaseous flow using background-oriented schlieren imaging will be used to understand the physical phenomena taking place in the hot plume atmosphere above the powder bed. The candidate must have high competency in programming skills and using MATLAB, understand fluid flow and working with optics, as well as the interest to perform laboratory experiments. Prior knowledge of schlieren imaging, different manufacturing techniques and fluid flow, in particular plasmas, will be advantageous.
|
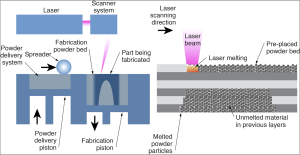 Schematic illustration of laser melt processes, from W. E. King et al., Applied Physics Reviews 2, 041304 (2015) |
2003: Experimental validation of the spatial resolution from tomographic imagingWe obtain instantaneous and time-averaged 3D information from experiments by combining different types of measurements with computed tomography (CT). For example, flame chemiluminescence measurements are used by a CT algorithm to reconstruct the structures within a combusting flow in our computed tomography of chemiluminescence (CTC) techniques. The aim of this project is to design an experiment which allows us to determine the spatial resolution achievable by our CTC methods. solid structures of known sizes, that represent a flame, should be imaged by the array of cameras in the setup for CTC. The structures should be opaque, and emit light in the visible range. The images will then be used to reconstruct the scene and the size of the calculated structures should be compared with the physical size. The tests should be conducted for different types of structures, representing different complexities within the scene and a metric for quantification of the spatial resolution should be devised.
|
 Image of the existing tomography setup around a burner. |
2004: Tomographic particle tracking velocimetry (Tomo-PTV)Computed tomography (CT) can be combined with different types of measurements, such as emission or absorption, to estimate the volumetric distribution of different parameters. The measurements are made from different angles around a probe volume (views), and are fed into an algorithm that calculates the three-dimensional (3D) field. In this project, we want to combine PTV with CT using our in-house tomography algorithms, to produce the 3D location of particles in a complex turbulent flow field. A phantom study needs to be performed first, to adapt the tomography algorithm and characterise its behaviour. A phantom is an exactly known field, that can be generated numerically through simulations for example, and allows for a quantitative analysis of the tomography by comparing the original and reconstructed phantoms. The study must look at the effect of particle concentration and number of views on the accuracy of the reconstructed particle field. The candidate must have strong numerical skills, understanding of fluid mechanics - in particular turbulence. A summary of the thesis shall be turned into a research paper that can be submitted to an international journal or conference.
|
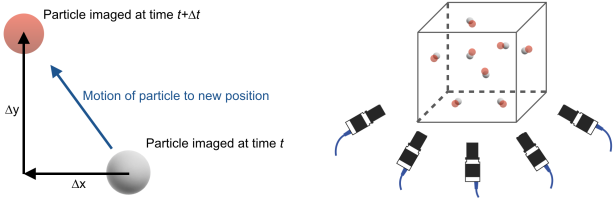 PTV concept |
2005: Finding the optimal camera arrangement in 3D space for flame tomographySeveral cameras are usually arranged around a burner to image the naturally occurring chemiluminescent light from the flame. The images are then used by a tomography algorithm to calculate the 3D chemiluminescence field. The number and arrangement of the cameras affects the quality of the reconstructed fields. A phantom study should be conducted to systematically vary the arrangement of multiple cameras in 3D space around a burner, to determine the best camera distribution. Our in-house evolutionary reconstruction technique can be used for this. The candidate must be very competent in programming skills and be able to adapt the existing code accordingly and work with it.
|
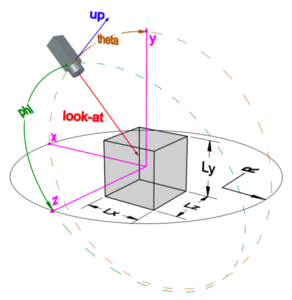 Illustration of camera location in 3D space, Unterbeger et al., IEEE International Conference on Image Processing (2019) |
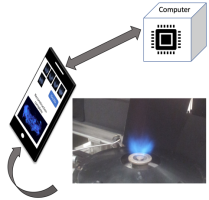
2006: Web-hosted tomographic reconstruction on any device: Go3D APPThe aim in this project is to reconstruct the instantaneous 3D flame shape using multiple images of the chemiluminescence light that are captured from different angles around the flame using a mobile phone or tablet. Our existing calibration and tomography algorithms should be combined in an App for automated online reconstructions. Familiarisation with an App development code, e.g. RStudio’s Shiny is required. The handling of our calibration and tomography procedure should be completed, at first offline. A server account has to be prepared on which the App should be executed with a simple first demonstration case. The candidate must have very high competence in programming, and very good grades in mathematics, computer graphics, numerical courses and other related subjects. Previous experience in App development will be beneficial. |
 |
