HUMECH-Humanoider Mechatronischer Roboter
Projektbeschreibung
Der technologische Fortschritt im Bereich Robotik erlaubt es, viele Funktionen und Anwendungen, die vor kurzem noch wie Science Fiction klangen, in realen Systemen einzusetzen. Es ist mittlerweile möglich Roboter zu bauen, die menschliches Aussehen bis zur Perfektion imitieren und auch kleinste Nuancen der Bewegung, wie z.B. die der Gesichtsmuskulatur berücksichtigen. Doch selbst die realistischste Hülle verspielt oftmals die Sympathie des menschlichen Betrachters, sobald sich der Roboter in Bewegung setzt.
Der Name dieses Phänomens ist im Bereich der humanoiden Roboterforschung bekannt unter dem Namen „Uncanny Valley“ [1]. Der Begriff begründet sich darauf, dass es dem Menschen „vor einem mehr an menschlichem Aussehenden Roboter dermaßen schaudert, dass die Sympathiewerte sozusagen in ein tiefes ‚Tal‘ rutschen“ [2]. Dieser Effekt verstärkt sich sogar, je weiter sich der Roboter dem menschlichen Aussehen annähert [2]. Kein geringerer als der japanische Roboterkonstrukteur Masahiro Mori, empfahl bereits vor über 35 Jahren als Ausweg aus diesem „Tal“ die Vermeidung menschlichen Aussehens in der Robotik [1]. Realistisch aussehende Roboter, wie z.B. der von Hiroshi Ishiguru mitentwickelte Actroid-F, sehen auf dem ersten Blick dem Menschen zum Verwechseln ähnlich. Doch in der Bewegung wirkt dieser eher abschreckend auf den Betrachter [3]. Zu Actroid-F wird z.B. vom Singularity Hub geurteilt [4]: "Actroid-F Female Telepresence Robot Looks Super Real, Creepy"
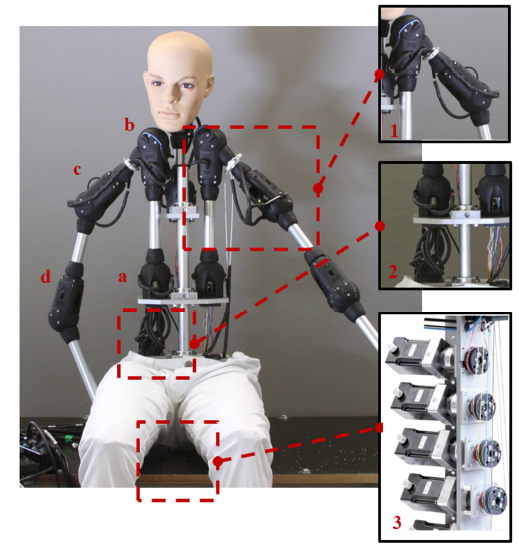

Für virtuelle Avatare und deren Einsatz in Lernumgebungen wird derzeit in einem BMBF-geförderten Projekt [5] an der Vermeidung des „Uncanny Valley Effektes“ durch eine entsprechende Bewegungstranskription gearbeitet. Dabei werden durch geeignete Animationstechniken die Anforderungen an die Abbildung der menschlichen Gestik erfüllt. In dem hier vorgeschlagenen Beitrag wird die Frage untersucht, ob eine fundamentale Neuausrichtung des Entwicklungsprozesses humanoider Roboter neben den konventionellen kinetischen und steuerungstechnischen Anforderungen nicht auch die Möglichkeiten zu Bewegungen umfassen muss, die den „Uncanny Valley Effekt“ vermeiden. So werden die Voraussetzungen geschaffen, die Wirkung humanoider Roboter auf ein menschliches Gegenüber entscheidend zu verbessern. Und zu untersuchen, in wieweit ein seilgetriebenes Antriebkonzept und dessen dynamisches Potential konventionellen Antriebskonzepten im Hinblick auf die beschriebenen Phänomene überlegen ist. Dazu wurde ein seilgetriebener humanoider Roboter entwickelt, der den anatomischen Vorgaben des Menschen möglichst nahe kommt und die nötigen Freiheitsgrade (DoF), Kräfte und Winkelgeschwindigkeiten menschlicher Bewegungen abbilden kann.
Veröffentlichungen
S. Feldmann, C. T. Chan, T. Bruckmann: Ropedriven, Actuators at Human Robotics, Mechatronics Symposium, Aachen, Germany, 2013, pp. 1-6, ISBN 3-86130-958-0.
W. Zysk, R. Filkov, S. Feldmann: Bridging the uncanny valley - From 3D humanoid Characters to Virtual Tutors, The Second International Conference on E-Learning and E-Technologies in Education, ICEEE2013, Lodz University of Technology, Sept. 23-25, 2013. ISBN: 978-1-4673-5093-8
Literatur
[1] Masahiro Mori: The Uncanny Valley. In: Energy, 7(4). S. 33-35, 1970
[2] Siegfried Frey: Goldene Zeiten für computer-generierte Schauspieler? SWR Vortrag 8 Mai 2007 (PDF unter:http://www.uni-due.de/virtuelletutoren)
[3] Masahiro Yoshikawa, Yoshio Masumoto, Masahiko Sumitani, Hiroshi Ishiguro, Development of An Android Robot for Psychological Support in Medical and Welfare Fields. In: International Conference on Robotics and Biomimetics, Phuket, Thailand, 2011
[4] Aaron Saenz: Actroid F Female Telepresence Robot Looks Super Real, Creepy.http://singularityhub.com/2010/10/31/actroid-f-female-telepresence-robot-looks-super-real-creepy-video/, 2010
[5] Anthropomorphe Tutoren für Lernprozesse in mit Web 2.0-Technologie unterstützten Lehr-/Lernszenarien, Universität Duisburg-Essen, Lehrstuhl für Mechatronik, http://www.uni-due.de/virtuelletutoren