Kleinrobotik
KUKA KR6/2
| Tragkraft am Flansch | 6 kg |
| Gewicht | 235 kg |
| Zahl der steuerbaren Achsen | 6 |
| Positionswiederholgenauigkeit | +/- 0,05 mm |
| Anwendung in der Industrie | Schweißaufgaben, Fertigung |
| Anwendung im Robotiklabor | Lehre (Schnupperpraktikum) |
| Greifer und Sensorik | 2 Greifer (Schunk), Druckmessdose (Schunk), Kraft-/Momentensensor (ROBOTIQ FT150), Druckluftversorgung |
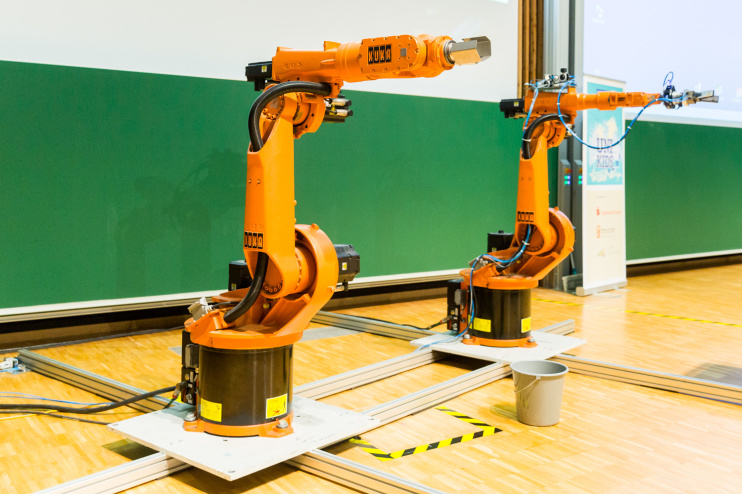
Der KR6 (in obigem Bild rechts) findet in der Industrie ein breites Anwendungsspektrum, da an den Flansch des Roboters einige verschiedene Greifer und Sensoriksysteme angebracht werden können.. Überwiegend wird er heute für Schweißaufgaben in Fertigungsstraßen, für die er mit seiner hohen Positionsgenauigkeit gut geeignet ist, genutzt. Heutzutage wird unter anderem die Interaktion mit dem Menschen erforscht, um diese in Zukunft einfach und schnell möglich zu machen. Das Modell im Robotiklabor des Lehrstuhls Mechanik und Robotik besteht grundlegend aus dem Steuerschrank, dem KCP (KukaControlPanel) und dem Roboter selbst. Zwischen dem Greifer und dem Flansch ist eine Druckmessdose montiert, die den Zusammenstoß mit Objekten verhindert und bei Überdruck den Roboter sofort mit Hilfe der verbauten Sensorik stoppt. Neben einem Greifer mit dem Würfel oder schweißgerätähnliche Objekte gegriffen werden können, kann wie im Bild zu sehen auch eine Kombination aus Kraft-/Momentsensorik und Greifer an den Flansch des KR6 angebracht werden. Mit diesem Aufbau kann der KR6 im Zusammenspiel mit dem KR15 Sektgläser greifen, füllen und wieder abstellen. Der Kraft-/Momentensensor der Firma Robotiq besitzt einen Kraftmessbereich von +/- 150N in alle Koordinatenrichtungen und einen Momentmessbereich von +/- 15Nm ebenfalls in alle Koordinatenrichtungen. Er misst mit einer Genauigkeit von ca. 0,5N bzw. 0,015Nm und arbeitet mit einer Datenausgabegeschwindigkeit von 100Hz. Mit einem Außendurchmesser von 120mm und einem Gewicht von lediglich 650g ist er ideal für die Anwendung am KR6 geeignet.
Die Druckmessdose der Firma Schunk arbeitet mit einem maximalen Druck von 6,2bar, sofern dieser überschritten wird springt automatisch der Not aus an, um Beschädigungen zu verhindern. Der im Bild zu sehende Greifer ist der PWG 60/s von Schunk, der durch eine hohe Kraftübertragung und eine Federgestützte Greifkrafterhaltung, die das Werkstück bei Druckverlust hält, gekennzeichnet. Das empfohlene Werkstückgewicht, welches mit diesem Greifer gegriffen werden kann beträgt 2,3Kg. Mit einer Wiederholgenauigkeit von 0,05mm und einer Schließ-und Öffnungszeit von 0,03s ist er optimal für die Anwendungen im Robotiklabor geeignet. Der 2. Greifer (s. Extrabild) ist der PGN plus 64/2 ein Zweifinger Parallelgreifer von Schunk, der durch eine hohe Momentaufnahme gekennzeichnet ist, durch die lange Greiffinger ohne Probleme montiert werden können. Das empfohlene Werkstückgewicht, welches mit diesem Greifer gegriffen werden kann beträgt 2,6Kg. Mit einer Wiederholgenauigkeit von 0,01mm und einer Schließ-und Öffnungszeit von 0,03s ist er noch etwas präziser als der PWG 60.
KUKA KR15/2
| Tragkraft am Flansch | 15 kg |
| Gewicht | 315 kg |
| Zahl der steuerbaren Achsen | 6 |
| Positionswiederholgenauigkeit | +/- 0,1 mm |
| Anwendung in der Industrie | Schweißaufgaben, Fertigung |
| Anwendung im Robotiklabor | Studentenprojekte (KinderUni), Forschung (Validierung von IMU-Sensordaten, Singularitätsvermeidung, Waiter-Motion-Problem) |
Der KR15 (in obigem Bild links) unterscheidet sich im Wesentlichen nur durch die höhere Traglast vom KR6. Im Gegensatz dazu ist er in der Genauigkeit dem KR6 unterlegen. Somit findet der KR15 in der Industrie ebenfalls ein breites Anwendungsspektrum, da an den Flansch des Roboters, ähnlich wie beim KR6, einige verschiedene Greifer und Sensoriksysteme angebracht werden können. Daher wird er für Schweißaufgaben in der Fertigung verwendet, für die eine nicht ganz so hohe Positionsgenauigkeit notwendig ist. Das Modell im Robotiklabor des Lehrstuhls Mechanik und Robotik besteht grundlegend aus dem Steuerschrank, dem KCP (KukaControlPanel) und dem Roboter selbst. Wie im Bild zu sehen ist an den Flansch des KR15 eine Halterung angebracht, die eine Sektflasche halten kann. Im Rahmen eines Projektes innerhalb der Universität ist der KR15 in Zusammenarbeit mit dem KR6 in der Lage Sektgläser zu füllen und wieder abzustellen.