LEAN
Entwicklung von Leichtbau-Regalbediengeräten auf Basis von Seilroboter-Technik aus NRW (LEAN)
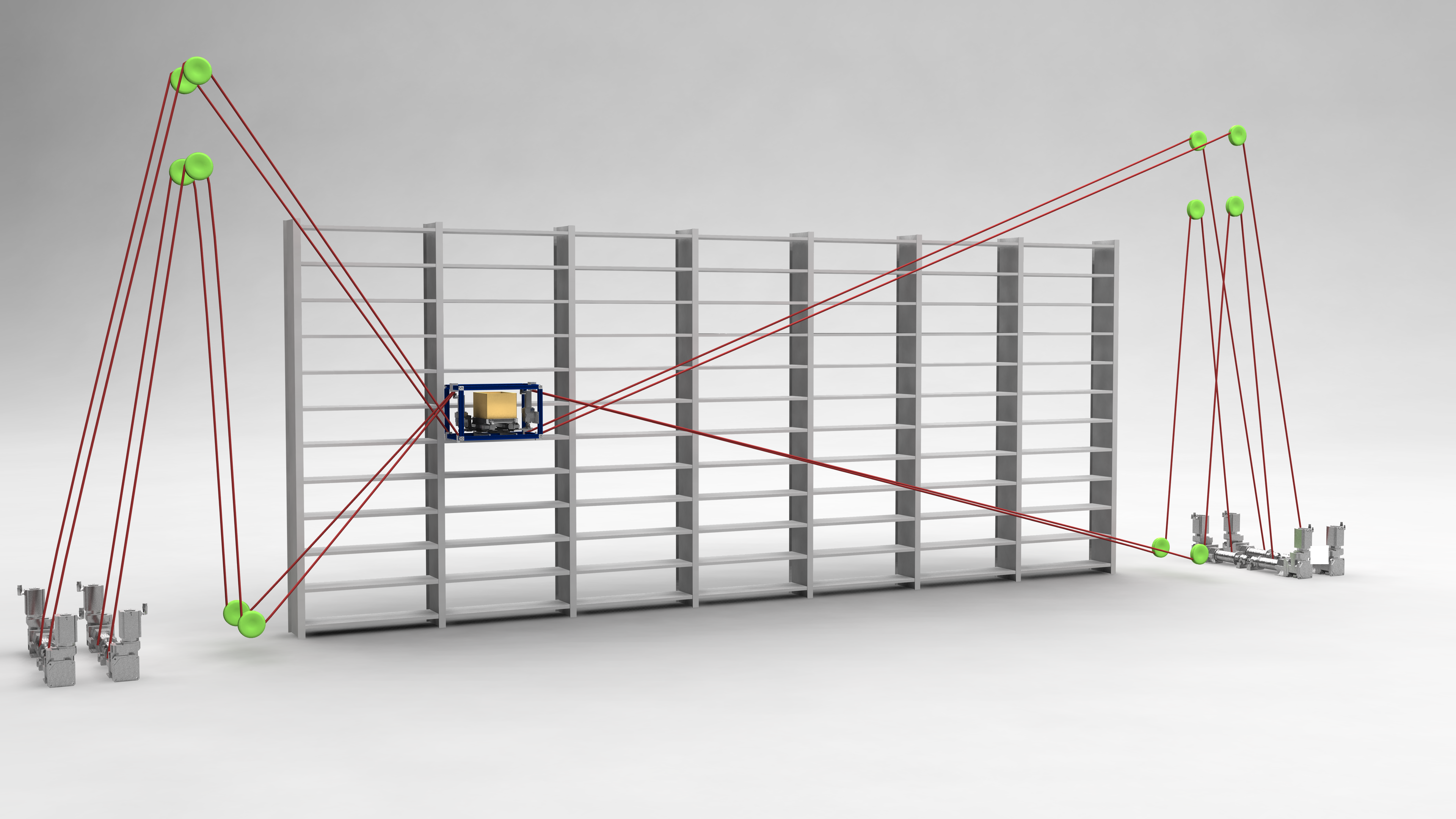
In diesem Vorhaben wird die Erforschung und Entwicklung eines neuartigen Leichtbau-Regalbediengerätes auf Basis von Seilrobotertechnologie umgesetzt. Ein Konsortium von Unternehmen und Forschungseinrichtungen aus NRW entwickelt die für die Umsetzung notwendigen innovativen Spitzenlösungen als Komponenten und Subsysteme, um basierend auf den Projektergebnissen künftig die leistungsfähigsten Regalbediengeräte am Markt anbieten zu können. Im Vergleich zu konventionellen Regalbediengeräten verfolgt das Projektvorhaben einen radikal neuen Ansatz: Vom konventionellen System verbleibt lediglich die Funktion der Ein-Auslagervorrichtung als Plattform. Diese wird nun von einem System verspannter Seile vor dem Regal geführt. Diese Seile werden durch eine koordinierte Steuerung mehrerer Seilwinden auf- oder abgewickelt und erlauben so eine präzise Positionierung der Ein-Auslagervorrichtung samt Nutzlast vor dem Hochregal. Bei konsequentem Einsatz von Leichtbautechniken wird die bereitgestellte Antriebsleistung fast ausschließlich für die Bewegung der Nutzlast genutzt. Die energiezehrenden Beschleunigungs- und Bremsvorgänge für die vergleichsweise hohen Massen konventioneller Regalbediengeräte entfallen. Eine Gewichtsreduktion von rund 90% kann dabei – basierend auf Vorversuchen – als realistisch angesehen werden. Drastische Energieeinsparungen und Leistungssteigerungen sind somit möglich.
Der Projektumfang liegt bei rund 2,4 Mio. €, getragen vom Leitmarktwettbewerb MobilitätLogistik.NRW
Projektlaufzeit:
04/2016 bis 30/06/2019
Projektbearbeiter am Lehrstuhl für Mechatronik:
- Christopher Reichert
- Tobias Bruckmann
- Michael Meik
- Patrik Lemmen
- Roland Boumann
Projektpartner:
- mercatronics GmbH, Bocholt
- HAVI Global Logistics GmbH, Duisburg
- w3logistics AG, Dortmund
- SDZ GmbH, Dortmund
- igus GmbH, Köln (Assoz. Partner)
- SICK AG, Waldkirch (Assoz. Partner)
beteiligte Lehrstühle/Abteilungen an der UDE:
- Lehrstuhl für Mechatronik (Prof. Schramm)
- Transportsysteme und -logistik (Prof. Noche)
Zugehörigkeit zu Profilschwerpunkten der Fakultät für Ingenieurwissenschaften an der UDE:
Weitere Informationen: www.uni-due.de/tul/research_lean_main.php