Project Dipl.-Ing. Matthias Tenzer
Dipl.-Ing. Matthias Tenzer, Prof. Dr.-Ing. Bettar Ould el Moctar Numerical calculation of Ship-Propeller-Rudder-Interaction during Manoeuvring of Inland Waterway Vessels in Shallow Water
Manö-Bin
The use of ship handling simulators in the field of inland waterway transport has increased rapidly in recent years. For more precise studies, e.g. vessel dynamics in off-design conditions, various improvements of the mathematical models in use for the description of the manoeuvring behaviour are necessary. Nowadays, the rudder forces in a modular mathematical model are determined on the basis of the two-dimensional calculation of lift and drag due to the flow around a hydrofoil.
In inland water navigation twin rudders with special hydrofoils at large rudder angles are increasingly used, whereas in maritime shipping usually single rudders at low rudder angles are in use. The aim of this project is the investigation of the complex fluid flow with respect to ship-propeller-rudder-interaction during the manoeuvring in shallow water by using numerical methods.
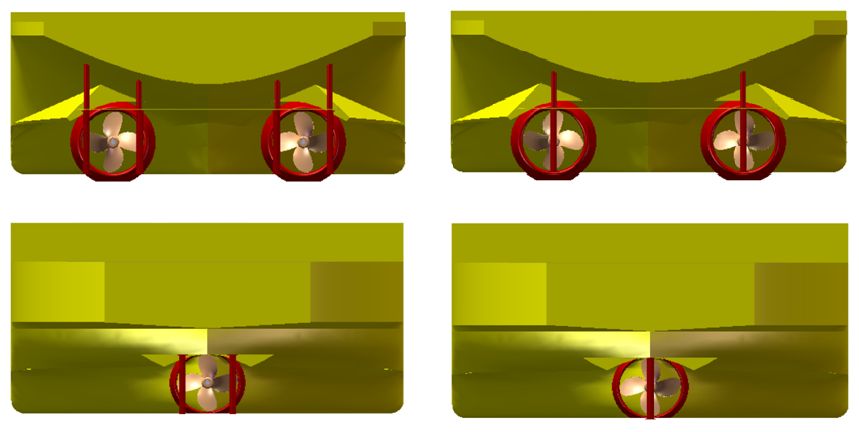
The fluid flow problem is to be solved by using suitable methods from the software suite OpenFOAM. By a systematic extension of the complexity the different effects can be determined. Introducing a body-force model to replace the propeller is of particular importance. The continued application of this approach highly depends on the attainable correctness. Within the final step of the project the complex fluid flow is to be solved by the geometric modelling of all parts to determine the interaction of ship, propeller and rudder.
For the purpose of validation, additional experimental investigations have been planned in cooperation with the Development Centre for Ship Technology and Transport Systems (DST). Besides the fundamental resistance and propulsion tests, measurements of the rudder forces depending on the environmental conditions are to be carried out. Measurements of the fluid flow at ship-propeller-rudder-interaction with the method of particle imaging velocimetry (PIV) are used for further validation of the numerical results.