
Area of Focus
Area of Focus of Faculty of Engineering
1. Research areas
Since the introduction of the term "Mechatronics",it has developed as a discipline of engineering sciences, which has been established in the scientific and industrial world almost 30 years ago. It deals with the interaction of mechanical, electronic and information technology components. The Chair of Mechatronics was founded in 1991 and is thus one of the oldest university-based Mechatronics Chairs in Germany. A team of about 20 scientists, headed by Prof. Dr.-Ing. Dr. h.c. Dieter Schramm focused on applications in the areas of mobility and manipulator technology. Central topics in the research and teaching of the chair are Energy-Efficient Vehicle Systems and Electro-mobility, Driving Simulators, Driving Dynamics and highly efficient and high-performance Large-scale Manipulators.


2 Projects und Cooperations
The extensive research work in the area of driver assistance systems is being concentrated on the one hand, in cooperation with the Chairs in the teaching unit Komedia on the Human-Machine interface and, on the other hand, on the use of the "Machine Learning" method in a variety of applications in the areas of driver assistance and driving dynamics.
Scientific studies on electromobility have been pursued at the Chair for approximately 8 years. In the course of the accompanying research, the chair has been involving with several employees both in the fleet projects ColognEmobil and PREMIUM as well as in the CAR Sharing project RuhrAuto E. Within the scope of the projects, several hundred vehicles are equipped with data loggers and the results are scientifically evaluated.
In addition to the experimental recording of flotation data, the staff of the chair is involved in the representation of traffic situations in driving simulators as well as in the simulation of traffic flows. The goal is to study the impact of electric motor drives and driver assistance systems on real traffic situations with up to 20,000 vehicles in real time. In driving simulators there has already been an intensive cooperation with the Hochschule Westfalen for several years. In the simulation of large vehicle groups, the Chair cooperates with the Chair of Distributed Systems (Prof. Weis).
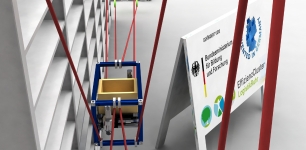
In the field of robotics, a focus is on the research of rope robots. The Field of application for this area is, for example in the industrial assembly of large components, where rope robots make it possible to realize enormously large manipulators cost-effectively. Other fields of application are bearing technology. Here, a demonstrator is developed in the LEAN project, in cooperation with the Department of Transport and Logistics as well as a consortium of industrial partners, which is tested in practice-oriented use.
Rope robots also have great potential for the automated erection of buildings in the area of building construction. Here, a cooperation exists with the UDE Institute for Building Construction. Due to its highly interdisciplinary character, however, the topic of research is also being explored across the entire university with Chairs of the University of the Ruhr like the Chair for Computer Science in Construction.
With this activities, the chair is working in co-operation with other departments of the faculty in the areas of the focus Human-centered cyber-physical systems, Smart Engineering and Resource Engineering.
The Chair for Mechatronics is a member of the Center for Automotive Research (CAR).as well as the Institute for System Dynamics and Mechatronics.
3 Equipment Facilities
- Testing hall with several static and dynamic driving simulators
- Experimental hall with prototypes for rope manipulators
- Computer cluster with high performance graphics for the evaluation of driving cycles and for training of "Machine Learning" algorithms
- Facilities for performing hardware-in-the-loop systems
4 Selected activities in specialized companies and journals
- Scientific Committee “International Conference on Recent Advances in Automotive Engineering & Mobility Research”, IEEE ASME International Conference on Advanced Intelligent Mechatronics, Automotive meets Electronics (VDE), Tagung Mechatronik (VDI), “International Conference on Cable-Driven Parallel Robots” (CableCon) unter Schirmherrschaft der IFToMM, International Conference of the XIII International Conference on Mechanisms and Mechanical Transmissions (MTM) and the International Conference on Robotics (Robotics)", "IFToMM D-A-CH Conference”
- Journal of Renewable Energy and Sustainable Development (Editoral Board)
- Technical Committee for Robotics and Mechatronics der International Federation for the Promotion of Mechanism and Machine Science (IFToMM)
- Fachausschüsse GMA 4.15 "Mechatronik“ und GMA 4.10 „Interdisziplinäre Produktentstehung“
5 Selected Publications
- T. REHDER, W. MUENST, L. LOUIS, D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving, 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.
- M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahr-antrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
- M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Re-search (ReCar), Malakka, Malaysia, 2015.
- N. MAAS, M. KOPPERS, B. HESSE, D. SCHRAMM, Simulator setup according to use case scenarios - A human-oriented method for virtual development, Mechatronic and Embedded Systems and Applications (MESA), 2014 IEEE/ASME 10th International Confer-ence on IEEE, Senigallia 2014, pp. 1-6.
- BRUCKMANN, T., H. MATTERN, A. SPENGLER, C. REICHERT, A. MALKWITZ and M. KÖNIG (2016). Automated Construction of Masonry Buildings using Cable-Driven Parallel Robots. Proceedings of 33rd International Symposium on Automation and Robotics in Con-struction (ISARC 2016), Auburn, Alabama, USA.
- REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM (2016). Influence of Different Ground Truth Hypothesis on the quality of Bayesian Networks for Maneuver Detection and Prediction of Driving Behavior. 13th International Symposium on Advanced Vehicle Control (AVEC 2016), München, Deutschland.
- S. JESCHKE, H. HIRSCH, M. KOPPERS, D. SCHRAMM, Investigations on the impact of different electric vehicle traction systems in urban traffic, Vehicle Power and Propulsion Conference (VPPC) 2013, IEEE Beijing, China, 2014, pp. 1 - 6
- M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahrantrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
- M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Rese-arch (ReCar), Malakka, Malaysia, 2015.
- M. GOUTTEFARDE, J. LAMAURY, C. REICHERT, T. BRUCKMANN: A Versatile Tension Distribution Algorithm for n-DOF Parallel Robots Driven by n + 2 Cables. In: Robotics 31 (2015), S. 1444 - 1457.
Human-Centered Cyber Physical Systems
1. Relevant research activity
The Chair of Mechatronics works within the scope of the FSP on scientific contributions, which are based on methods for the recording of vehicle dynamics and consumption data in vehicle fleets in real use and on the application of advanced methods of "Machine Learning" and Simulation technology for their evaluation. These include:
-
Recognition and modeling of driver behavior in selected traffic situations [1] [2].
-
Methods for simulating vehicles, drivers and environmental traffic in real time.
-
M-M interactions in autonomous and semi-autonomous driving including the handover situation from automated state back to the vehicle driver.
-
Simulation of pedestrians and drivers / vehicles in real driving situations and use of methods for intentional prediction.
-
Detection of the use of customer carriages in vehicle fleets by mobile data loggers [3] [4, 5].
-
Hybrid simulation of traffic flow with more than 10,000 vehicles.


2. Projects and Cooperations
-
ALFASY (from 03/2017) - Design of vehicles for older drivers supported by ...
-
Automated learning algorithms in mobile applications for the prediction of unknown states
-
PREMIUM - Analysis of the use of vehicle fleets with electrified vehicles funded by the BMBU
-
RuhrautoE- Use of electrified vehicles in CAR sharing systems.
3. Equipment facilities
-
Several dynamically driven and static Driving Simulators, computer clusters.
-
Approx. 700 own data loggers for central online recording of driving conditions.
4. Five Selected Publications or Patents
-
[1] T. REHDER, W. MUENST, L. LOUIS, D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving, 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.
-
[2] T. REHDER, Z. GEORGIEV, L. LOUIS, D. SCHRAMM, Effektive Nutzung von hochdimensionalen kontinuierlichen Daten Umfelddaten zur Prädiktion von Fahrverhalten mit Bayesschen Netzen, AAET 2015, Braunschweig, Deutsch, 2015.
-
[3] M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahrantrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
-
[4] M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Research (ReCar), Malakka, Malaysia, 2015.
-
[5] N. MAAS, M. KOPPERS, B. HESSE, D. SCHRAMM, Simulator setup according to use case scenarios - A human-oriented method for virtual development, Mechatronic and Embedded Systems and Applications (MESA), 2014 IEEE/ASME 10th International Conference on IEEE, Senigallia 2014.
Smart Engineering
1. Relevant Research Activity
Within the framework of the FSP, the Chair of Mechatronics is working on scientific contributions based, on the one hand, on methods from the field of parallel mechanisms with a special focus on cable manipulators and, on the other hand, on the application of advanced methods of "Machine Learning". These include the topics
- Automated wall building on the basis of cable robot technology and related to this
- The use of Building Information Modelling (BIM) for data provision and trajectory generation.
- The hybrid simulation and optimisation of construction processes based on cable robots.
- The modelling, simulation and control of parallel cable robots.
- The analysis and optimisation of construction processes and site logistics (Bruckmann, Mattern et al. 2016, Mattern, Bruckmann et al. 2016)
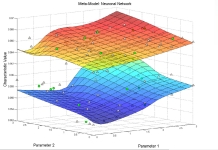
- The application of advanced "machine learning" methods to a variety of problems from vehicle technology and (planned) robotics. Here, in addition to studies on predicting the intention of e.g. road users (Rehder, Muenst et al. 2016, Rehder, Muenst et al. 2016), the focus is also on the application to estimation in series products of physical quantities that are difficult or very costly to measure (Blume, Reicherts et al. 2015).
2. Projects and Cooperations
The project is supported by funding from the Mercator Research Center Ruhr (MERCUR). Project partners are the Chair of Construction Management at TU Dortmund University (Prof. Gralla), the Chair of Computer Science in Construction at RUB (Prof. König) and the Chairs/Institutes of Mechatronics (Prof. Schramm) and Construction Management (Prof. Malkwitz) at UDE.
3. Equipment
- Cable robot test rigs (12m x 6m x 2m and 2m x 2m x 2m)
- Several dynamically driven and static driving simulators
4. Five selected publications or patents
- [1] BLUME, S., S. REICHERTS and D. SCHRAMM, Verfahren zur Lösung von Echtzeitmodellen in mobilen Anwendungen. Fachtagung Mechatronik 2015, Dortmund, Deutschland, 2015.
- [2] BRUCKMANN, T., H. MATTERN, A. SPENGLER, C. REICHERT, A. MALKWITZ and M. KÖNIG, Automated Construction of Masonry Buildings using Cable-Driven Parallel Robots. Proceedings of 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), Auburn, Alabama, USA, 2016.
- [3] MATTERN, H., T. BRUCKMANN, A. SPENGLER and M. KÖNIG, Simulation of Automated Construction using Wire Robots. Proceedings of the 2016 Winter Simulation Conference, Washington, D.C., USA, 2016.
- [4] REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM, Influence of Different Ground Truth Hypothesis on the quality of Bayesian Networks for Maneuver Detection and Prediction of Driving Behavior. 13th International Symposium on Advanced Vehicle Control (AVEC 2016), München, Deutschland, 2016.
- [5] REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving. 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.
Smart Engineering
1. Relevant Research Activity
Within the framework of the FSP, the Chair of Mechatronics is working on scientific contributions based, on the one hand, on methods from the field of parallel mechanisms with a special focus on cable manipulators and, on the other hand, on the application of advanced methods of "Machine Learning". These include the topics
- Automated wall building on the basis of cable robot technology and related to this
- The use of Building Information Modelling (BIM) for data provision and trajectory generation.
- The hybrid simulation and optimisation of construction processes based on cable robots.
- The modelling, simulation and control of parallel cable robots.
- The analysis and optimisation of construction processes and site logistics (Bruckmann, Mattern et al. 2016, Mattern, Bruckmann et al. 2016)
- The application of advanced "machine learning" methods to a variety of problems from vehicle technology and (planned) robotics. Here, in addition to studies on predicting the intention of e.g. road users (Rehder, Muenst et al. 2016, Rehder, Muenst et al. 2016), the focus is also on the application to estimation in series products of physical quantities that are difficult or very costly to measure (Blume, Reicherts et al. 2015).
2. Projects and Cooperations
The project is supported by funding from the Mercator Research Center Ruhr (MERCUR). Project partners are the Chair of Construction Management at TU Dortmund University (Prof. Gralla), the Chair of Computer Science in Construction at RUB (Prof. König) and the Chairs/Institutes of Mechatronics (Prof. Schramm) and Construction Management (Prof. Malkwitz) at UDE.
3. Equipment
- Cable robot test rigs (12m x 6m x 2m and 2m x 2m x 2m)
- Several dynamically driven and static driving simulators
4. Five selected publications or patents
- [1] BLUME, S., S. REICHERTS and D. SCHRAMM, Verfahren zur Lösung von Echtzeitmodellen in mobilen Anwendungen. Fachtagung Mechatronik 2015, Dortmund, Deutschland, 2015.
- [2] BRUCKMANN, T., H. MATTERN, A. SPENGLER, C. REICHERT, A. MALKWITZ and M. KÖNIG, Automated Construction of Masonry Buildings using Cable-Driven Parallel Robots. Proceedings of 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), Auburn, Alabama, USA, 2016.
- [3] MATTERN, H., T. BRUCKMANN, A. SPENGLER and M. KÖNIG, Simulation of Automated Construction using Wire Robots. Proceedings of the 2016 Winter Simulation Conference, Washington, D.C., USA, 2016.
- [4] REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM, Influence of Different Ground Truth Hypothesis on the quality of Bayesian Networks for Maneuver Detection and Prediction of Driving Behavior. 13th International Symposium on Advanced Vehicle Control (AVEC 2016), München, Deutschland, 2016.
- [5] REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving. 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.