
Fakultätsschwerpunkte
Fakultätsschwerpunkte der Ingenieurwissenschaften
1. Forschungsgebiete
Die Mechatronik hat sich seit der Einführung dieses Begriffs vor ca. 30 Jahren zu einer sowohl im wissenschaftlichen als auch im industriellen Umfeld etablierten Disziplin der Ingenieurwissenschaften entwickelt. Sie beschäftigt sich mit dem Zusammenwirken mechanischer, elektronischer und informationstechnischer Komponenten. Der Lehrstuhl für Mechatronik wurde bereits 1991 gegründet und zählt damit zu den ältesten universitären Mechatronik-Lehrstühlen in Deutschland. Hier beschäftigt sich ein Team von ca. 20 Wissenschaftlern unter der Leitung von Prof. Dr.-Ing. Dr. h.c. Dieter Schramm schwerpunktmäßig mit Anwendungen in den Bereichen Mobilität und Manipulatortechnik. Zentrale Themen in Forschung und Lehre des Lehrstuhls sind energieeffiziente Fahrzeugsysteme und Elektromobilität, Fahrsimulatoren, Fahrdynamik sowie hocheffiziente und performante Großmanipulatoren.


2 Projekte und Kooperationen
Die Forschungsarbeiten im Bereich der Fahrerassistenzsysteme konzentrieren sich einerseits, in Zusammenarbeit mit Lehrstühlen in der Lehreinheit Kognitions- und Medienwissenschaften, auf die Mensch-Maschinen-Schnittstelle und andererseits auf den Einsatz der Methode des „Machine Learning“ in einer Vielfalt von Anwendungen in den Bereichen Fahrerassistenz aber auch der Fahrdynamik. Wissenschaftliche Untersuchungen zur Elektromobilität werden am Lehrstuhl seit ca. 8 Jahren verfolgt. Dabei war und ist der Lehrstuhl im Rahmen der Begleitforschung mit mehreren Mitarbeitern maßgeblich u.a. sowohl in den Flottenprojekten ColognEmobil und PREMIUM als auch an dem CAR Sharing Projekt RuhrautoE beteiligt. Dabei werden mehrere hundert Fahrzeuge mit Datenloggern ausgestattet und die Messdaten wissenschaftlich ausgewertet. Neben der online Erfassung von Flottendaten engagieren sich die Mitarbeiter des Lehrstuhls auch bei der Darstellung von Verkehrssituationen in Fahrsimulatoren. Ziel ist das Studium der Auswirkung von E-Antrieben und Fahrerassistenzsystemen auf reale Verkehrssituationen mit bis zu 20.000 Fahrzeugen in Echtzeit. Bei den zugrundeliegenden Simulationsmethoden für große Fahrzeugsysteme kooperiert der Lehrstuhl mit dem Lehrstuhl Verteilte Systeme (Prof. Weis).
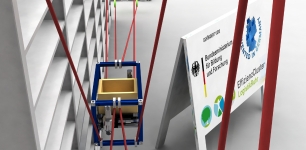
Im Bereich Manipulatortechnik liegt ein Schwerpunkt auf der Regelung von Seilmanipulatoren. Einsatzbereiche dieser regelungstechnisch und mathematisch anspruchsvollen Anlagen sind u.a. die industriellen Montage von Großbauteilen, wo mit Seilmanipulatoren kostengünstig sehr große Manipulatoren realisiert werden. Andere Anwendungsfelder finden sich der Lagertechnik. Hier wird im Förderprojekt LEAN in Kooperation mit dem Lehrstuhl Transport und Logistik sowie einem Industriekonsortium ein Demonstrator entwickelt und im praxisnahen Einsatz erprobt. Im Bereich Hochbau stellen Seilroboter ein großes Potential für die automatisierte Errichtung von Gebäuden dar. Hier besteht eine Kooperation mit dem Institut für Baubetrieb der UDE. Das Thema wird aufgrund des hoch interdisziplinären Charakters aber auch universitätsübergreifend mit Lehrstühlen der Universitätsallianz Ruhr erforscht, so z.B. mit dem Lehrstuhl für Informatik im Bauwesen.
Mit seinen Aktivitäten engagiert sich der Lehrstuhl gemeinsam mit anderen Lehrstühlen der Fakultät auf den Gebieten der Profilschwerpunkte Human-centered-cyber-physical Systems , Smart Engineering und Resource Engineering.
Der Lehrstuhl für Mechatronik ist Mitglied des Centers Automotive Research (CAR) sowie des Instituts für Systemdynamik und Mechatronik.
3 Ausstattung
- Versuchshalle mit mehreren statischen und dynamische Fahrsimulatoren
- Versuchshalle mit Prototypen für Seilmanipulatoren
- Rechnercluster mit Hochleistungsgraphikkarten zur Auswertung von Fahrzyklen und zum Trainieren von „Machine Learning“ Algorithmen
- Einrichtungen zur Durchführung von Hardware-in-the-Loop-Systemen
4 Ausgewählte Tätigkeiten in Fachgesellschaften und Journalen
- Scientific Committee “International Conference on Recent Advances in Automotive Engineering & Mobility Research”, IEEE ASME International Conference on Advanced Intelligent Mechatronics, Automotive meets Electronics (VDE), Tagung Mechatronik (VDI), “International Conference on Cable-Driven Parallel Robots” (CableCon) unter Schirmherrschaft der IFToMM, International Conference of the XIII International Conference on Mechanisms and Mechanical Transmissions (MTM) and the International Conference on Robotics (Robotics)", "IFToMM D-A-CH Conference”
- Journal of Renewable Energy and Sustainable Development (Editoral Board)
- Technical Committee for Robotics and Mechatronics der International Federation for the Promotion of Mechanism and Machine Science (IFToMM)
- Fachausschüsse GMA 4.15 „Mechatronik“ und GMA 4.10 „Interdisziplinäre Produktentstehung“
5 Ausgewählte Publikationen
- T. REHDER, W. MUENST, L. LOUIS, D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving, 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.
- M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahr-antrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
- M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Re-search (ReCar), Malakka, Malaysia, 2015.
- N. MAAS, M. KOPPERS, B. HESSE, D. SCHRAMM, Simulator setup according to use case scenarios - A human-oriented method for virtual development, Mechatronic and Embedded Systems and Applications (MESA), 2014 IEEE/ASME 10th International Confer-ence on IEEE, Senigallia 2014, pp. 1-6.
- BRUCKMANN, T., H. MATTERN, A. SPENGLER, C. REICHERT, A. MALKWITZ and M. KÖNIG (2016). Automated Construction of Masonry Buildings using Cable-Driven Parallel Robots. Proceedings of 33rd International Symposium on Automation and Robotics in Con-struction (ISARC 2016), Auburn, Alabama, USA.
- REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM (2016). Influence of Different Ground Truth Hypothesis on the quality of Bayesian Networks for Maneuver Detection and Prediction of Driving Behavior. 13th International Symposium on Advanced Vehicle Control (AVEC 2016), München, Deutschland.
- S. JESCHKE, H. HIRSCH, M. KOPPERS, D. SCHRAMM, Investigations on the impact of different electric vehicle traction systems in urban traffic, Vehicle Power and Propulsion Conference (VPPC) 2013, IEEE Beijing, China, 2014, pp. 1 - 6
- M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahrantrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
- M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Rese-arch (ReCar), Malakka, Malaysia, 2015.
- M. GOUTTEFARDE, J. LAMAURY, C. REICHERT, T. BRUCKMANN: A Versatile Tension Distribution Algorithm for n-DOF Parallel Robots Driven by n + 2 Cables. In: Robotics 31 (2015), S. 1444 - 1457.
Human-Centered Cyber Physical Systems
1. Relevante Forschungsaktivität
Der Lehrstuhl für Mechatronik arbeitet im Rahmen des FSP an wissenschaftlichen Beiträgen, die auf Methoden aus dem Bereich Erfassung fahrdynamischer und Verbrauchsdaten in Fahrzeugflotten im realen Einsatz und auf der Anwendung fortgeschrittener Methoden des „Machine Learning“ und der Simulationstechnik zu deren Auswertung beruhen. Hierzu gehören u.a.:
- Erfassung und Modellierung des Fahrerverhaltens in ausgewählten Verkehrssituationen [1] [2].
- Methoden zur Simulation von Fahrzeugen, Fahrern und Umgebungsverkehr in Echtzeit.
- M-M-Interaktionen beim autonomen und semi-autonomen Fahren einschließlich der Übergabesituation aus automatisiertem Zustand zurück zum Fahrzeugführer.
- Simulation von Fußgängern und Fahrern/Fahrzeugen in realen Fahrsituationen und Anwendung von Methoden zur Intentionsvorhersage.
- Erfassung der Nutzung von Kunden-Fzgen in Fzg.-Flotten durch mobile Datenlogger [3] [4, 5].
- Hybride Simulation des Verkehrsflusses mit mehr als 10.000 Fahrzeugen.


2. Projekte und Kooperationen
- ALFASY – Altersgerechte Fahrerassistenzsysteme
- Maschinelle Lernalgorithmen in mobilen Anwendungen zur Prädiktion unbekannter Zustände
- PREMIUM – Analyse der Nutzung von Fahrzeugflotten mit elektrifizierten Fahrzeugen gefördert durch das BMBU
- RuhrautoE – Nutzung elektrifizierter Fahrzeuge in von CAR-Sharing Systemen.
3. Ausstattung
- Mehrere dynamisch angetriebene und statische Fahrsimulatoren, Rechner-Cluster
- Ca. 700 eigene Datenlogger zur zentralen Online-Erfassung von Fahrzuständen
4. Fünf Ausgewählte Publikationen oder Patente
- [1] T. REHDER, W. MUENST, L. LOUIS, D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving, 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.
- [2] T. REHDER, Z. GEORGIEV, L. LOUIS, D. SCHRAMM, Effektive Nutzung von hochdimensionalen kontinuierlichen Daten Umfelddaten zur Prädiktion von Fahrverhalten mit Bayesschen Netzen, AAET 2015, Braunschweig, Deutsch, 2015.
- [3] M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahrantrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
- [4] M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Research (ReCar), Malakka, Malaysia, 2015.
- [5] N. MAAS, M. KOPPERS, B. HESSE, D. SCHRAMM, Simulator setup according to use case scenarios - A human-oriented method for virtual development, Mechatronic and Embedded Systems and Applications (MESA), 2014 IEEE/ASME 10th International Conference on IEEE, Senigallia 2014.
Smart Engineering
1. Relevante Forschungsaktivität
Der Lehrstuhl für Mechatronik arbeitet im Rahmen des FSP an wissenschaftlichen Beiträgen, die einerseits auf Methoden aus dem Bereich paralleler Mechanismen mit einem speziellen Fokus auf Seilmanipulatoren und andererseits auf der Anwendung fortgeschrittener Methoden des „Machine Learning“ beruhen. Hierzu gehören u.a. die Themen
- Automatisiertes Mauern von Gebäudewänden auf Basis von Seilroboter-Technik und damit verbunden
- Der Einsatz von Building Information Modeling (BIM) zur Datenbereitstellung und Trajektoriengenerierung.
- Die Hybride Simulation und Optimierung von Bauprozessen auf Basis von Seilrobotern.
- Die Modellierung, Simulation und Regelung von parallelen Seilrobotern.
- Die Analyse und Optimierung von Bauverfahren und Baustellenlogistik (Bruckmann, Mattern et al. 2016, Mattern, Bruckmann et al. 2016)
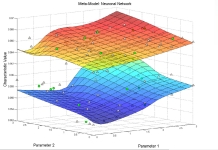
- Die Anwendung fortgeschrittener Methoden des „Machine Learning“ auf eine Vielzahl von Problemen aus der Fahrzeugtechnik und (geplant) der Robotik. Hierbei steht neben Untersuchungen zur Vorhersage der Intention von z.B. Verkehrsteilnehmern (Rehder, Muenst et al. 2016, Rehder, Muenst et al. 2016) auch die Anwendung zur Schätzung in Serienprodukten schwer oder nur sehr aufwendig messbarer physikalischer Größen im Vordergrund (Blume, Reicherts et al. 2015).
2. Projekte und Kooperationen
Das Projekt wird getragen durch eine Förderung des Mercator Research Center Ruhr (MERCUR). Projektpartner sind der Lehrstuhl Baubetrieb und Bauprozessmanagement an der TU Dortmund (Prof. Gralla), der Lehrstuhl für Informatik im Bauwesen an der RUB (Prof. König) sowie an der UDE die Lehrstühle/Institute Mechatronik (Prof. Schramm) und Baubetrieb und Baumanagement (Prof. Malkwitz)
3. Ausstattung
- Seilroboter-Prüfstände (12m x 6m x 2m und 2m x 2m x 2m)
- Mehrere dynamisch angetriebene und statische Fahrsimulatoren
4. Fünf Ausgewählte Publikationen oder Patente
- [1] BLUME, S., S. REICHERTS and D. SCHRAMM, Verfahren zur Lösung von Echtzeitmodellen in mobilen Anwendungen. Fachtagung Mechatronik 2015, Dortmund, Deutschland, 2015.
- [2] BRUCKMANN, T., H. MATTERN, A. SPENGLER, C. REICHERT, A. MALKWITZ and M. KÖNIG, Automated Construction of Masonry Buildings using Cable-Driven Parallel Robots. Proceedings of 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), Auburn, Alabama, USA, 2016.
- [3] MATTERN, H., T. BRUCKMANN, A. SPENGLER and M. KÖNIG, Simulation of Automated Construction using Wire Robots. Proceedings of the 2016 Winter Simulation Conference, Washington, D.C., USA, 2016.
- [4] REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM, Influence of Different Ground Truth Hypothesis on the quality of Bayesian Networks for Maneuver Detection and Prediction of Driving Behavior. 13th International Symposium on Advanced Vehicle Control (AVEC 2016), München, Deutschland, 2016.
- [5] REHDER, T., W. MUENST, L. LOUIS and D. SCHRAMM, Learning Lane Change Intentions through Lane Contentedness Estimation from Demonstrated Driving. 19th IEEE Intelligent Transportation Systems Conference (ITSC 2016), Rio De Janeiro, Brasilien, 2016.
Energy and Resource Engineering
1. Relevante Forschungsaktivität
Der Lehrstuhl für Mechatronik arbeitet im Rahmen des FSP an Beiträgen, die sich mit der wissenschaftlichen Analyse von Energieströmen in Kraftfahrzeugen sowie der Einsparung von Energie unter Beibehaltung und Steigerung der Funktionalität von Manipulatorsystemen beschäftigen. Hierzu gehören:
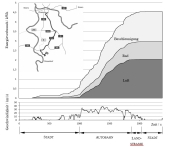
- Effiziente Fahrzeugantriebe unter spezifischen Nutzeranforderungen durch die Erfassung von Bewegungsdaten und die simulationsgestützte Analyse zur Prädiktion von Einzel- und Flottenverbräuchen sowie die Bewertung der fahrzeugspezifischen Einflussgrößen in Verkehrsflusssimulationen [1] [2] [3].
- Assistenzsysteme zur Steigerung der Energieeffizienz
- Regalbediengeräte auf Basis von Seilroboter-Technik [4] [5] u.a. im Hinblick auf die Berechnung energieeffizienter Trajektorien und energiesparende Regelkonzepte

2. Projekte und Kooperationen
- Entwicklung von Leichtbau-Regalbediengeräten auf Basis von Seilroboter-Technik aus NRW (LEAN)“ getragen vom Leitmarktwettbewerb MobilitätLogistik.NRW mit 7 Projektpartnern aus der Industrie und den LS Mechatronik (Schramm) sowie Transport und Logistik (Noche)
- PREMIUM (Plug-In-, Range-Extender- und Elektrofahrzeuge unter realen Mobilitätsumstän-den: Infrastruktur, Umweltbedingungen und Marktakzeptanz): Förderung durch das BMUB unter Beteiligung von universitären und industriellen Projektpartnern
- RuhrAutoE: Förderung durch BMVI.
- Prädiktion unbekannter Zustände
3. Ausstattung
- Seilroboter-Prüfstände (12m x 6m x 2m und 2m x 2m x 2m)
- Mehrere dynamisch angetriebene und statische Fahrsimulatoren; Rechnercluster
4. Fünf Ausgewählte Publikationen oder Patente
- [1] S. JESCHKE, H. HIRSCH, M. KOPPERS, D. SCHRAMM, Investigations on the impact of different electric vehicle traction systems in urban traffic, Vehicle Power and Propulsion Conference (VPPC) 2013, IEEE Beijing, China, 2014, pp. 1 - 6
- [2] M. KOPPERS, S. TEWIELE, D. SCHRAMM, Identifikation der Energieverteilung von Fahrantrieb und Nebenaggregaten in realen Fahrprofilen im Flottenbetrieb, Automotive meets Electronics, Dortmund, 2016, pp. 111-116.
- [3] M. SCHÜLLER, S. TEWIELE, T. BRUCKMANN, D. SCHRAMM, Evaluation of alternative drive systems based on driving patterns comparing Germany, China and Malaysia, 3rd International Conference on Recent Advances in Automotive Engineering & Mobility Research (ReCar), Malakka, Malaysia, 2015.
- [4] L. FEHLBERG, C. REICHERT, T. BRUCKMANN, J. VON ZITZEWITZ, Ausnutzung energiespeichernder Elemente zur Effizienzsteigerung seilbasierter Regalbediengeräte, in: T. Bertram, B. Corves, K. Janschek (Eds.), Fachtagung Mechatronik 2013, Fachtagung Mechatronik ; VDI/VDE-Gesellschaft Mess- und Automatisierungstechnik ; Gesellschaft Produkt- und Prozessgestaltung, Aachen, 2013, pp. 171-176.
- [5] M. GOUTTEFARDE, J. LAMAURY, C. REICHERT, T. BRUCKMANN: A Versatile Tension Distribution Algorithm for n-DOF Parallel Robots Driven by n + 2 Cables. In: Robotics 31 (2015), S. 1444 - 1457.