Automatisiertes Mauern von Gebäudewänden
Automatisiertes Mauern von Gebäudewänden
Im Rahmen dieses Forschungsprojektes sollen innovative Bauverfahren unter Verwendung von Robotern erforscht werden. Hier fehlte bislang die entsprechende Technologie, da konventionelle Robotertechnik aufgrund der geringen Reichweiten serieller Roboterarme (maximal 5m) nicht einsetzbar ist.
Mit der Seilrobotertechnologie steht jedoch eine Technik für den Bau sehr großer Roboter bereit. Im Rahmen dieses Forschungsprojektes sollen innovative Bauverfahren unter Verwendung von Seilrobotern erforscht werden.
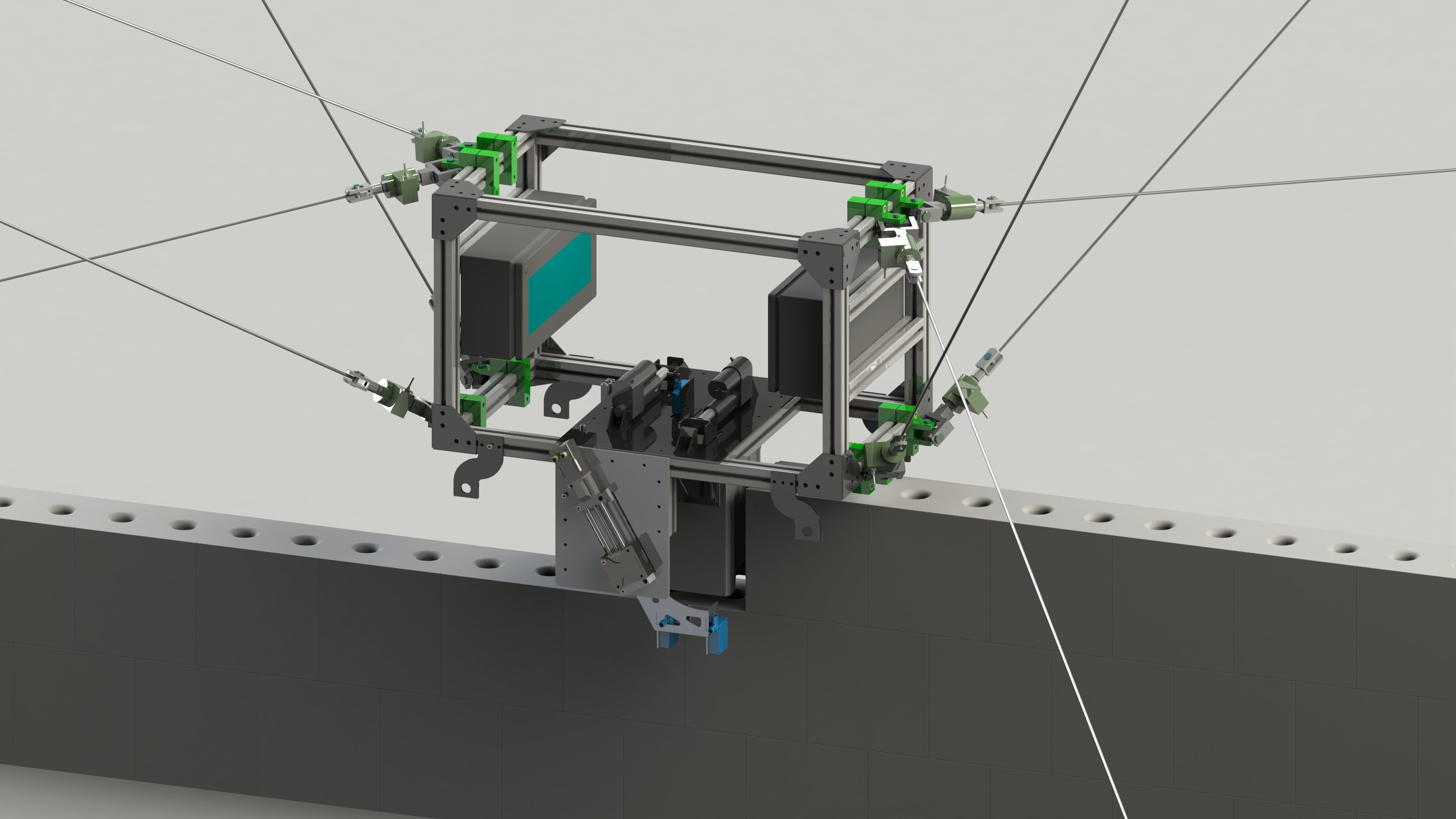
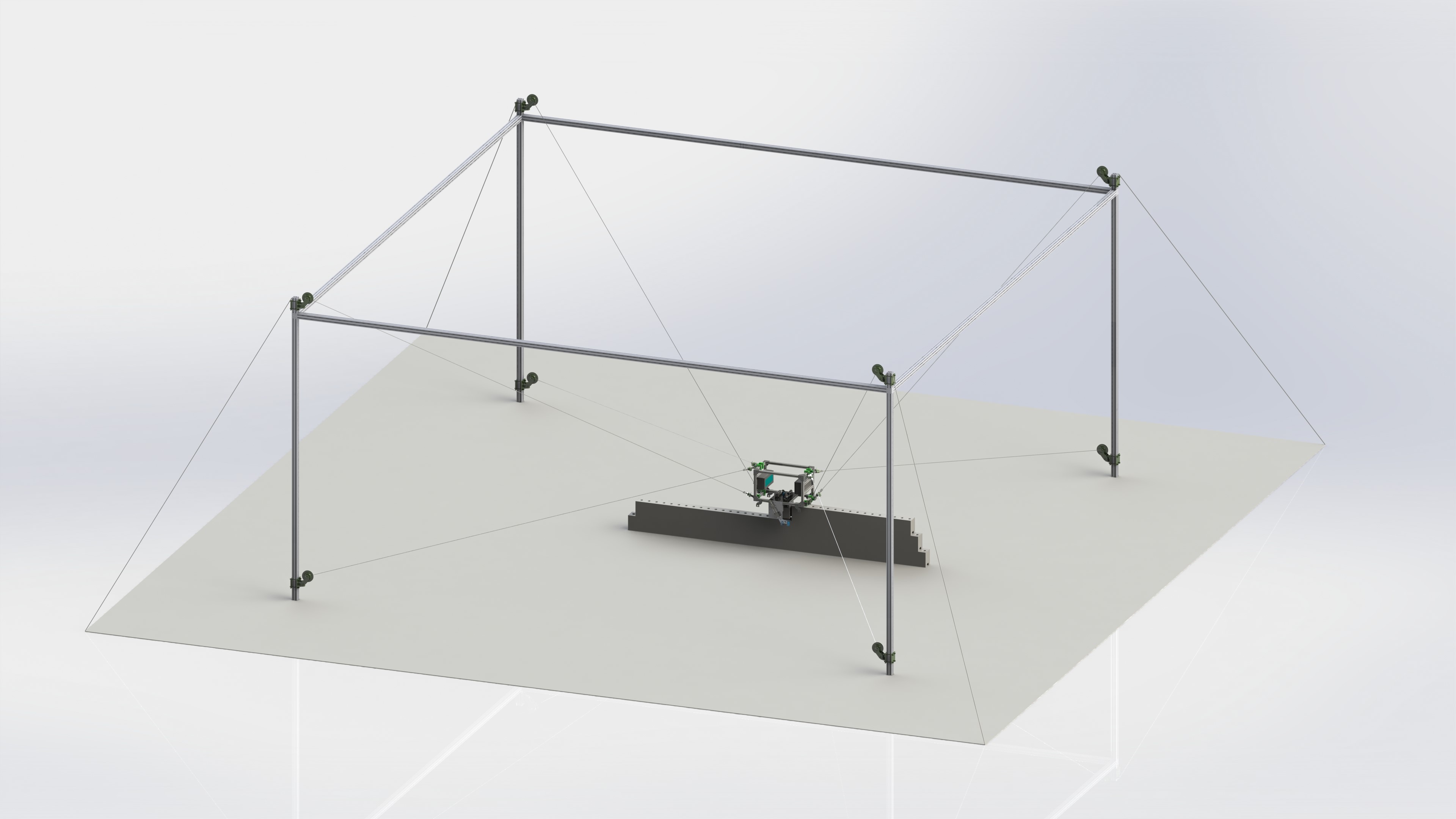
In einer ersten Machbarkeitsstudie soll mit einem Seilroboter (Größe ca. 12m x 6m x 2m) das automatische Errichten von Wänden praktisch erprobt werden, um die Machbarkeit der Projektidee nachzuweisen. Ziel ist es, mit Hilfe eines vom Roboter geführten Greifers eine Mauer aus Rastermauerblöcke aus Kalksandstein präzise und sehr schnell zu errichten. Dabei werden moderne mechatronische Sensor- und Aktuatorkonzepte genutzt, um eine automatische Aufnahme sowie den schnellen Transport und das präzise Absetzen der Mauerblöcke mit dem Endeffektor sicherzustellen.
Der Projektumfang liegt bei rund 49.882 €, getragen von der Anschubfinanzierung des Mercator Research Center Ruhr (MERCUR)
Projektlaufzeit: 01/2016 – 08/2016
Projektbearbeiter am Lehrstuhl für Mechatronik:
beteiligte Lehrstühle/Abteilungen an der UDE:
- Lehrstuhl für Mechatronik (Prof. Schramm)
- Institut für Baubetrieb und Baumanagement (Prof. Malkwitz)
Projektpartner:
- Lehrstuhl Baubetrieb und Bauprozessmanagement an der TU Dortmund (Prof. Gralla)
- Lehrstuhl für Informatik im Bauwesen an der RUB (Prof. König)
Zugehöhrigkeit zu Profilschwerpunkten der Fakultät für Ingenieurwissenschaften an der UDE:
Die Erkenntnisse aus dem Forschungsprojekt fließen in angrenzende Kooperationen. So kooperiert der Lehrstuhl für Mechatronik mit der Fachdidaktik Bautechnik an der UDE (Dr. Christian Karl) in der Vorbereitung von Grundlagen zur disziplinübergreifenden Diskussion des Themas Industrie 4.0 in der Bauwirtschaft, vor allem mit Blick auf die berufliche Ausbildung des Bauwesens der Zukunft.