
Ausstattung
Robotik
Quadruped Unitree A1
- Abmessungen: 500 x 300 x 400mm
- Gewicht: 12Kg
- Geschwindigkeit: 3,3m/s (11,88km/h)
- Drehmoment/Motor: 33,5N.m
- Rotationsgeschw. / Motor: 21 rad/s
- RTOS: Ubuntu (16.04 oder 18.04) + ROS
- ARM-Cortex-A72 CPU für einfache SLAM aufgaben mit z.B. 2D Lidar
- Nvidia NX Computer für Path-Planning, 3D-Slam
3D-Lidar Ouster OS1
- Lagen: 32
- Vertical Field of View: 45°
- Horizontal Field of View: 360°
- Points per second: 655.000
RGBD-Kamera ZED2i
- 1080p bei 30 oder 15 Hz
- Depth range 0.2m – 20 m
- Depth Frames per Second: <100 Hz
- Depth Field of View: 110° H x 70° V x 120° D
- Technology: Neural Stereo Depth Sensing
- Integrated IMU, barometer, magnetometer
LocoBot
RGBD-Kamera ZED2
- 1080p bei 30 oder 15 Hz
- Depth range 0.2m – 20 m
- Depth Frames per Second: <100 Hz
- Depth Field of View: 110° H x 70° V x 120° D
- Technology: Neural Stereo Depth Sensing
- Integrated IMU, barometer, magnetometer
Edge AI Gateway ZED Box
- Nvidia Jetson TX2 NX
- 256-core NVIDIA Pascal GPU
- Dual-Core Nvidia Denver 2 64-Bit CPU and Quad-Core ARM Cortex-A57 MPCore CPU
- 4 GB LPDDR4 - 51.2 GB/s Memory
- eMMC 16GB SSD 256GB M.2 NVMe Storage
2D-Lidar RPLIDAR A2M8
- Horizontal Field of View: 360°
- Samples per Second: 8000
- Range: 12 m
Industrielle Bildverarbeitung - CHRISS-Labor
Industriekamera
Zur hochauflösenden Aufnahme von großen Oberflächen steht eine 8 Megapixel Grauwertkamera mit schnellem Kodak CCD Sensor im "Micro Four Thirds" Format zur Verfügung. Die Kamera bietet eine duale GigE Schnittstelle zur Datenübertragung und Steuerung vom PC. Dabei können bis zu 16 vollaufgelöste Grauwertbilder pro Sekunde im 12-bit Datenformat - das sind ca. 190MB/s - dauerhaft übertragen werden. Die Versorgungsspannung wird ebenfalls über das Netzwerkkabel bereitgestellt (PoE - Power over Ethernet), aber mit dem externen Netzteil kann die Kamera an jeder Netzwerkkarte betrieben werden.
Highlights
- Kodak CCD-Sensor
- 18,13 x 13,6 mm
- 3296 x 2472 Pixel
- 5,5 x 5,5 µm Pixelgröße
- 16 Bilder/s (Vollformat)
- Max. 79 Bilder/s (Ausschnitt)
- 256 MB interner Bildspeicher
- Dual-GigE mit PoE Schnittstelle
- Interner Temperatursensor
Zum Abfotografieren von großen Oberflächen wurden zwei geometrisch verzerrungsfreie Vergrößerungsobjektive angeschafft. Diese hochauflösenden Makro-Objektive sind für Vergrößerungsmaßstäbe von 1X bzw. 0,5X und 2X optimiert. Wir verwenden diese Makro-Objektive zusammen mit der zuvor genannten Grauwertkamera um Oberflächen in einer nativen theoretischen Objekt-Auflösung von 2,75 µm, 5,5 µm, 11 µm und 22 µm zu scannen.
Highlights
- 1X bzw. 0,5X und 2X Vergrößerungsmaßstäbe
- Für große Sensoren bis 70 bzw. 80 mm Bildkreis
- Für Sensoren bis 7 µm bzw. 5 µm Auflösung
- Geometrisch absolut verzerrungsfreie Abbildung
- Apochromatisches Linsensystem
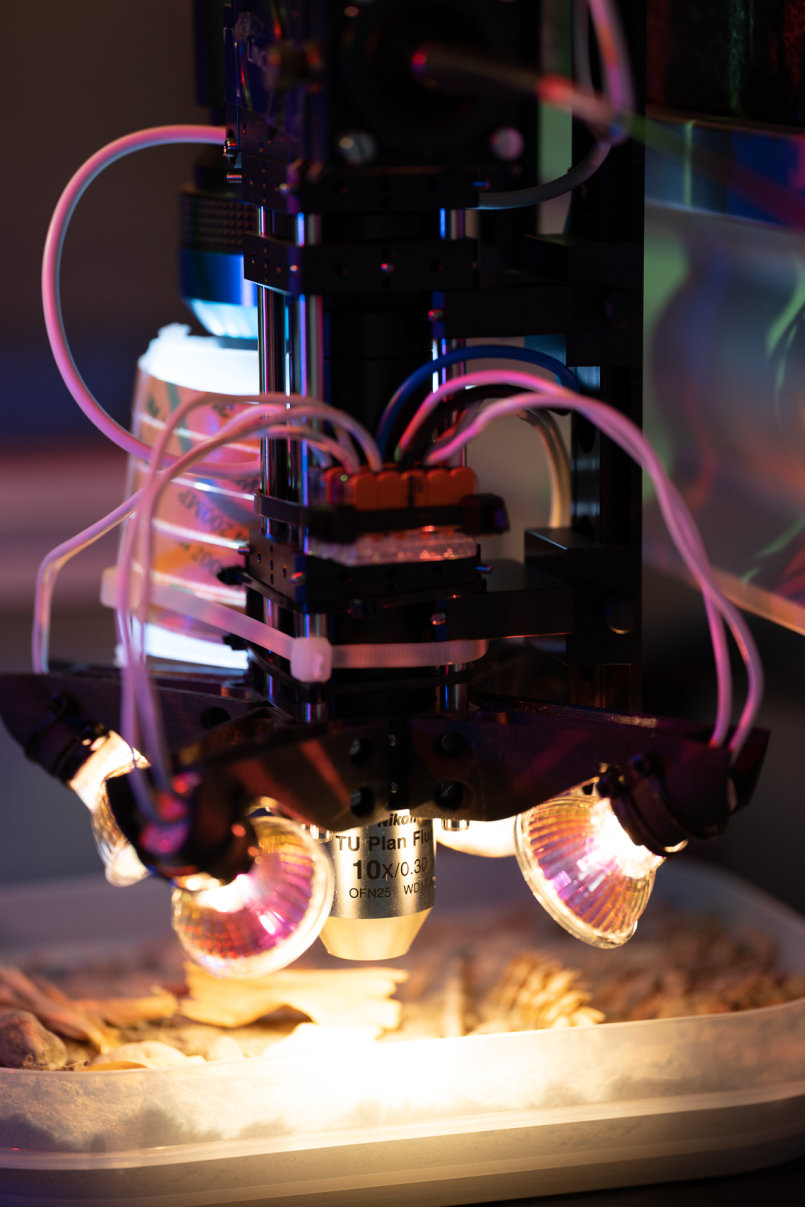
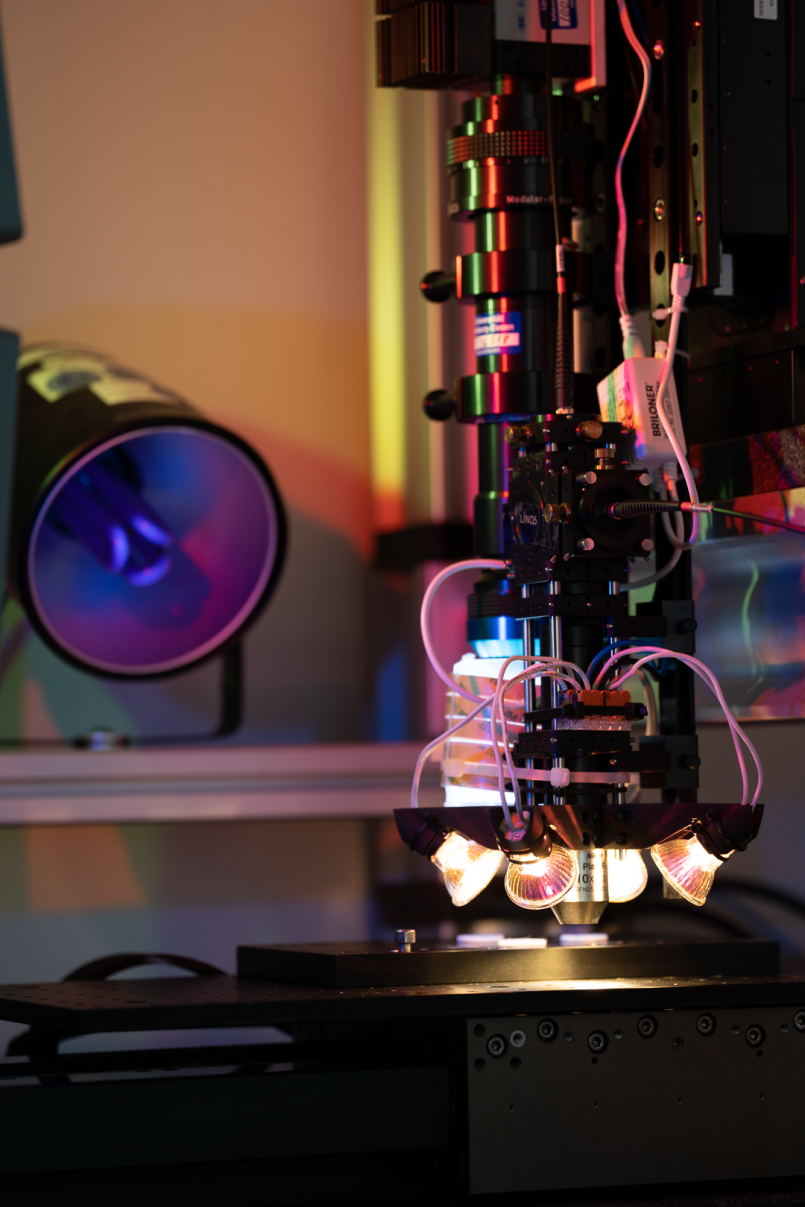
Mikroskop-Objektive
Für höchstauflösende Aufnahmen sowohl im sichtbaren als auch im NIR/SWIR Wellenlängenbereich wurde ein 10X vergrößerndes Mikroskopobjektiv mit guter Transmission, einer Numerischen Apertur NA = 0,3 und großem Arbeitsabstand zur leichteren Verwendung mit einer externen Dunkelfeld-Lichtquelle angeschafft. Im Vergleich zu einem Makro-Objektiv erreicht man in Kombination mit einem modernen Bildsensor bereits Ortsauflösungen an der physikalischen Grenze von etwa 500 Nanometern, allerdings auf Kosten einer sehr geringen Schärfentiefe von nur wenigen Mikrometern und einem sehr kleinen Aufnahmebereich.
Highlights
- 10X vergrößernd
- Mit 17,3 mm großer Arbeitsabstand
- Verzerrungsfreie Abbildung auch bei größeren Bildsensoren
- Sichtbarer und NIR/SWIR Wellenlängenbereich
Kartesischer Roboter
Zum hochgenauen Positionieren und Ausrichten unseres Kamerasystems wurde ein XYZ Positioniersystem aus Lineartischen spezifiziert und aufgebaut. Das Scansystem besteht aus einer luftgelagerten X Achse für schwere Lasten und einem weiten Verfahrweg, sowie einer davon getrennt auf einem Portal montierten YZ Einheit aus kreuzrollengelagerten Lineartischen, welche das Kamerasystem tragen und auch der sub-mikrometergenauen Fokussierung dienen. Mithilfe dieses Positioniersystems können große industriell gefertigte Oberflächen automatisiert abgefahren und vollständig eingescannt werden. Dazu werden viele Einzelbilder zu einem einzelnen hochauflösenden Bild zusammengesetzt. Wir erstellen routinemäßig geometrisch verzerrungsfreie Bilder mit einer nominellen Ortsauflösung von bis zu 2,75 µm / Pixel und einer Größe von 6 Gigapixeln.
Highlights
- Große Scanfläche von 400 mm X 125 mm
- Große Lasten bis 20 Kg
- Hohe Wiederholgenauigkeit von < 1 µm auf allen Achsen
- Hohe Scangeschwindigkeit bis 50 mm/s
- Temperaturstabilisiertes Bildverarbeitungslabor
GPU-Pool
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet. Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet.