Projektverlauf WiMi-Care
Laufzeit: November 2008 bis Oktober 2011
Im Folgenden werden die einzelnen Arbeitspakete und der geplante Projektverlauf in Kürze vorgestellt:
2008Vorbereitungen zur Bedarfsanalyse und SzenarienentwicklungIn den ersten zwei Monaten der Laufzeit des Vorhabens werden zunächst die geplanten empirischen Erhebungen zur Ermittlung des Bedarfs vorbereitet. Diese stellen die Grundlage für eine anwenderorientierte Szenarienentwicklung dar, die wiederum die Grundlage für eine bedarfsgerechte Technikentwicklung ist. Dabei erfolgt eine intensive Abstimmungen zwischen den an dem Vorhaben beteiligten Partnern (Fraunhofer IPA, MLR-System GmbH, User Interface Design GmbH und Universität Duisburg-Essen), sowie eine sinnvolle Einordnung der unterschiedlichen Zielsetzungen, Perspektiven und Expertisen. Außerdem werden erste Absprachen mit einer Pflegeeinrichtung der Stadt Stuttgart, in der die Bedarfsanalyse und die Pilotanwendungen stattfinden sollen, getroffen. |
2009Entwicklung von Anwendungsszenarien von Servicerobotik im PflegesektorAusgehend von typischen Einsatzumgebungen einer stationären Pflegeeinrichtung werden Anforderungen und Abläufe ausgewählt, die mit Hilfe von Servicerobotik vereinfacht werden sollen mit der Zielsetzung die Pflegekräfte zu entlasten und dadurch auch die Lebensqualität der Bewohner zu erhöhen. Die Abläufe werden umfangreich durch Beobachtungen, Gruppendiskussionen, Einzelgespräche mit Pflegepersonal, Pflege- und Heimleitung, sowie BewohnerInnen dokumentiert, um notwendige Technologieentwicklungen zunächst in Form von Szenarien zu spezifizieren und dann im Laufe des Projekts umzusetzen. Diese werden in mehreren iterativen Schleifen zu immer konkreteren Szenarien verdichtet, die gemäß eines Szenario-Basierten-Technikdesigns als Vorlage für die Weiterentwicklung der Serviceroboter (Care-O-bot/ Fraunhofer IPA und CASERO/ MLR-System GmbH) dienen.
Usability- und Nutzerforschung zur Bedarfsanalyse und Evaluierung von Servicerobotikanwendungen im PflegesektorGleichzeitig werden, um die Usability der für die Pilotanwendungen entwickelten Prototypen sicherzustellen, (Experten-) Interviews geführt, um bereits frühzeitig sicherzustellen, dass die angedachten Lösungen möglichst anwenderfreundlich und bedarfsgerecht gestaltet werden.
Wissenstransfer zwischen industriellen Robotikanwendungen und Servicerobotikanwendungen im Pflegesektor / Wissenstransfer zwischen Servicerobotikentwicklung und Anwendern im PflegesektorZur gleichen Zeit starten die Arbeitspakete, die den jeweiligen Wissensfluss untersuchen. Eine zentrale Arbeitshypothese stellt hier die begründete Vermutung dar, dass beide Felder von einem optimierten Wissenstransfer profitieren. Eine erste Analyse fokussiert vor allem die Übertragung von Wissensressourcen (bspw. technische Einzelkomponenten oder spezifisches Know-How) aus dem industriellen Bereich zum Servicebereich. Beim zweiten Arbeitspaket – welches bereits stark mit der Bedarfsanalyse verknüpft ist – werden die Austauschprozesse zwischen den NutzernInnen und EntwicklerInnen verfolgt und untersucht.
Weiterentwicklung notwendiger Technologien gemäß ermittelter AnwendungsszenarienZiel dieses Arbeitspaketes ist die Entwicklung der technischen Schlüsselkomponenten, welche für die Umsetzung der ausgewählten Anwendungsszenarien benötigt werden. Dies beinhaltet sowohl Hardware- als auch Softwarekomponenten. Auf Seiten der Softwareentwicklungen sind insbesondere die Bereiche Navigation, Mensch-Roboter-Interaktion, Sicherheit, Datenerfassung und -fusion zu berücksichtigen. |
2010Pilotanwendungen gemäß ermittelter Anwendungsszenarien / TechnikevaluationUm eine möglichst hohe Gebrauchstauglichkeit zu erreichen, ist die Durchführung von Usability-Tests in einer Pflegeeinrichtung der Kernpunkt des Projekts. Hierbei sollen die ermittelten und definierten Szenarien realisiert, im Labor getestet, in einer Pflegeeinrichtung in Betrieb genommen und dort in enger Abstimmung mit dem Pflegepersonal betrieben werden. Ggf. werden daraufhin weitere Optimierungen vorgenommen und in einer zweiten Pilot-Testphase erprobt.
ZwischenevaluationDie Erfahrungen der Pilot-Testphase(n) werden in Kooperation aller Partner ausführlich evaluiert. Dabei erfolgt zunächst eine Bilanzierung aller Einzelbefunde. Im Anschluss daran wird eine erste Bündelung der Resultate vorgenommen, die insbesondere in die Entwicklung der übergreifenden Wissenstransferschleife einfließen wird.
Zwischen-WorkshopDie anvisierten wissenschaftlichen und technischen Entwicklungen bieten Potenzial für kurz-, mittel- und langfristige Produktentwicklungen. Der Entwicklungsstand, die Verfügbarkeit von Technologien und Wissenstransfermethoden sollen der Öffentlichkeit zugänglich gemacht und präsentiert werden. Von den ersten Ergebnissen, resultierend aus den in weiten Teilen originären Projekterfahrungen, sollen die betreffenden Branchen und Akteure damit frühzeitig profitieren. |
2011Geschäftsmodelle für mikrosystemtechnische Anwendungen am Beispiel von Servicerobotik im PflegesektorDer Schwerpunkt liegt an dieser Stelle auf der konkreten Operationalisierung und Bündelung der allgemeinen Ergebnisse bezüglich eines idealen Entwicklungsprozesses bedarfsgerechter Servicerobotik für den Pflegebereich. Es werden übertragbare Prinzipien und Empfehlungen extrahiert und modellhaft vorgestellt. |
 |
Modellierung einer Wissenstransferschleife zur Entwicklung innovativer Mikrosystemtechnik im Pflegesektor am Beispiel von ServicerobotikanwendungenNeben der konkreten Weiterentwicklung von Produkten für die Servicerobotik im Pflegebereich und der Entwicklung geeigneter Instrumente für die Benutzer- und Usability-Forschung stellt dieser Abschnitt das wesentliche und abschließende Ziel von WiMi-Care dar: Hier werden die aus den Untersuchungen des „Wissenstransfer zwischen industriellen Robotikanwendungen und Servicerobotikanwendungen im Pflegesektor“ und dem „Wissenstransfer zwischen Servicerobotikentwicklung und Anwendern im Pflegesektor“ gewonnenen Erkenntnisse zueinander geführt, um die erfolgreiche und anwendungsorientierte Entwicklung von Servicerobotik zu verbessern. Es sollen dadurch konkrete Anhaltspunkte für eine aktive Gestaltung der Zukunft des Pflegesektors unter Einbezug aller wesentlichen Akteure (Entwickler- und Anwenderseitig) ermöglicht werden und somit ein Beitrag für eine nutzerbezogene Technikentwicklung geleistet werden. Abschluss-WorkshopIm Abschluss-Workshop liegt der Schwerpunkt auf den konkreten Erfahrungen der Pilotphase und damit des Einsatzes der Serviceroboter in einer Pflegeeinrichtung. Hierbei wird es also darum gehen eine erste empirisch fundierte Bilanz zu ziehen: Die Erfolgsbedingungen und -aussichten einer bedarfsgerechten Technikentwicklung für den Pflegesektor auf der Grundlage einer Szenarienbasierten Planung und Umsetzung sollen mit Hilfe der im Projekt gesammelten Erfahrungen und gewonnenen Erkenntnissen vorgestellt werden. |
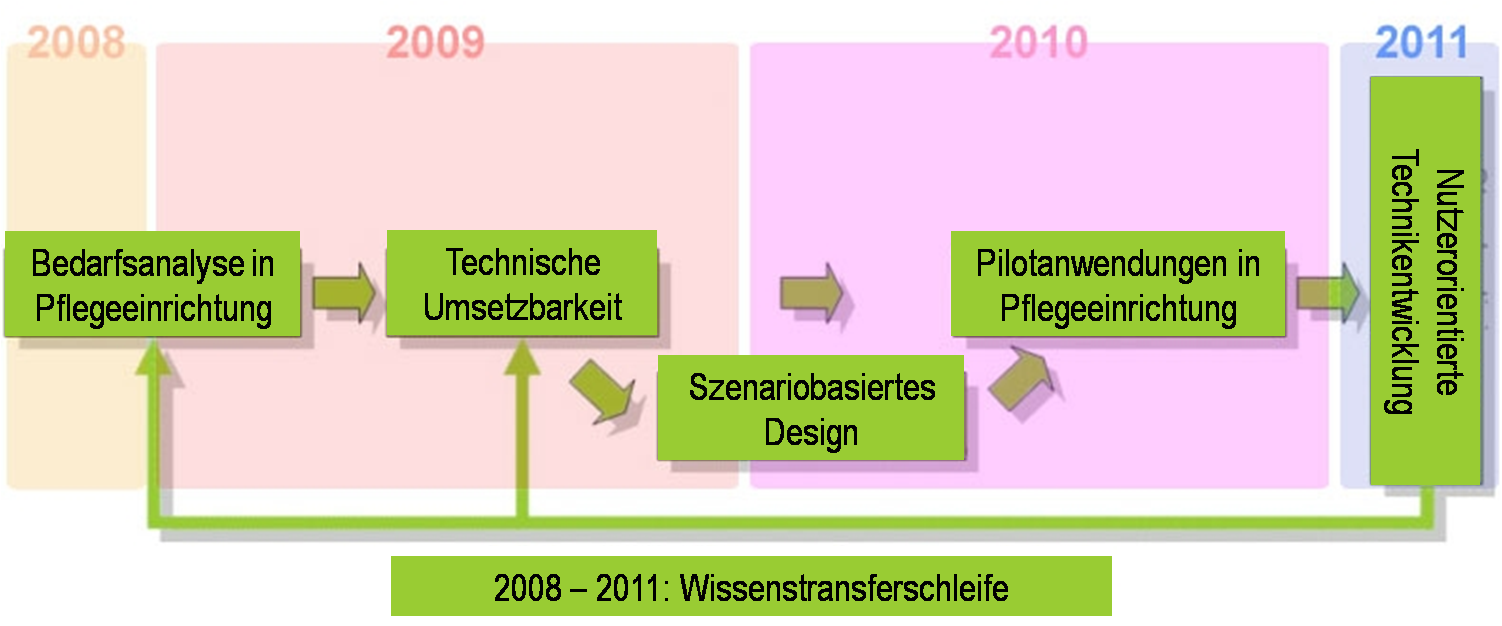
Schematische Darstellung des Projektverlaufs