Bachelor/Master Theses - Autonomous LEGO Mindstorms Robot

Autonomous LEGO Mindstorms Robot – possible tasks for Bachelor- and Master-ThesesKeywords: Autonomous Robot, Image Processing, Navigation, Sensor Fusion, Control, networked systems |
|
|
The usage of autonomous mobile systems increases rapidly. Autonomous cars and industrial mobile transportation systems are a popular example. A further development is the increasing networking of the components. The LEGO Mindstorms Robot is a low cost robot with two big and one small engine. Additionally, the robot can use for 4 sensors. Available sensors are an ultrasonic, an infrared, two touch and a gyro sensor. As support a camera system based on raspberry PI is used, which is mounted at the robot or above the test environment. |
|
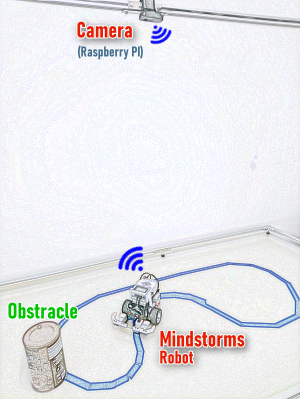 Figure 1: Sheme of the enviornment
Figure 1: Sheme of the enviornmentThe following table contains possible task fields regarding the Mindstorms/camera-environment.
| Control-oriented Tasks: | Short description: | |
| Controller design | BA/MA | Design of event/time discrete controller like speed control |
| Safety | BA/MA | Design of safety functions like collision avoidance |
| Sensor fusion | BA/MA | Design of soft sensor by using multiple sources |
| Strategy-oriented Tasks: | Short description: | |
| Navigation | BA/MA | Design of localization, mapping and path planning |
| Cyber Security | BA/MA | Simulation, detection and prevention of cyber attacks |
| Image processing-oriented Tasks: | Short description: | |
| Self-calibration | MA | Design an automatic calibration procedure |
| Object detection | BA/MA | Detection of obstacles and robots |
| Variation: | Short description: | |
| Mechanical design | BA/MA | Use different robot design like four-wheel drive |
| Collaboration | MA | Use more than one system which solve the task together |
Info + Contact
Required Lectures/Software Skills:
|
BA+MA: Regelungstechnik EiT, Digitale Regelung, Matlab/Simulink; MA: Prozessautomatisierung, Mehrgrößenregelung, Modeling and Simulation |
Possible start: expected from WS 2020/21
Dr.-Ing. Chris Louen, BB514
chris.louen@uni-due.de