Projekte Robotik - Projects Robotics
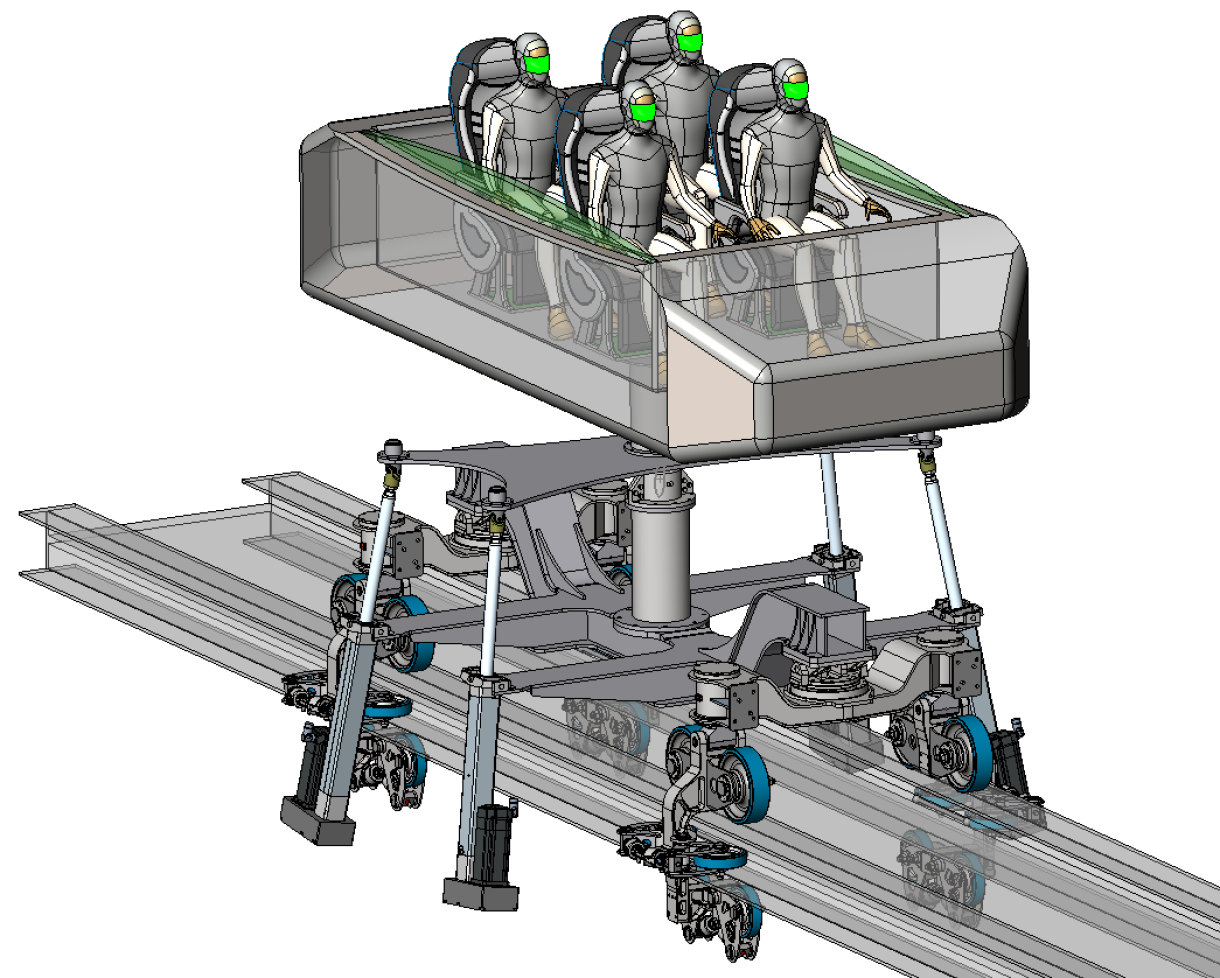
Entwicklung eines schienengeführten Mehrachssimulators
Im Rahmen des vom ZIM (Zentrales Innovationsprogramm Mittelstand) geförderten Projektes “Entwicklung eines schienengeführten Mehrachssimulators” wird in Zusammenarbeit mit der Beutler Transport Systeme GmbH ein neuartiger Amusement Ride entwickelt, der die bisherigen Technologien einer schienengeführten Achterbahn mit einer roboterarmgeführten Plattform auf begrenztem Raum kombiniert. Hierzu wird eine roboterarmgeführte Plattform auf einer Schiene bestehend aus einen kompakten, kleinen Rundkurs mit engen Kurven, Kuppen und Wannen platziert und auf dieser bewegt. Durch Veränderungen Geschwindigkeit sowie der Positionierung der Plattform über den Roboterarm wird jede Runde eine andere Kraft / Beanspruchung auf den Fahrgast einwirken, so dass für ihn nicht der Eindruck besteht, er würde sich auf einem kleinen Rundkurs befinden. Hiermit soll den Fahrgästen ein täuschend echtes Fahrgefühl eines langen Fahrkurses mit extremen Manövern vermittelt werden, ohne dabei physisch diesen Kurs wirklich (komplett) zu durchfahren. Die Stimulation der visuellen Reize erfolgt dabei über eine VR-Brille, wobei je nach Klientel die Bahn mit unterschiedlichen Geschwindigkeiten und eingeblendeten Filmen erfolgen kann.
Partner:
• Beutler Transport Systeme GmbH (München)
Details:
• Laufzeit: 01.8.2020 - 30.09.2023
• Fördergeber / Förderkennzeichen: ZF4047825RP9
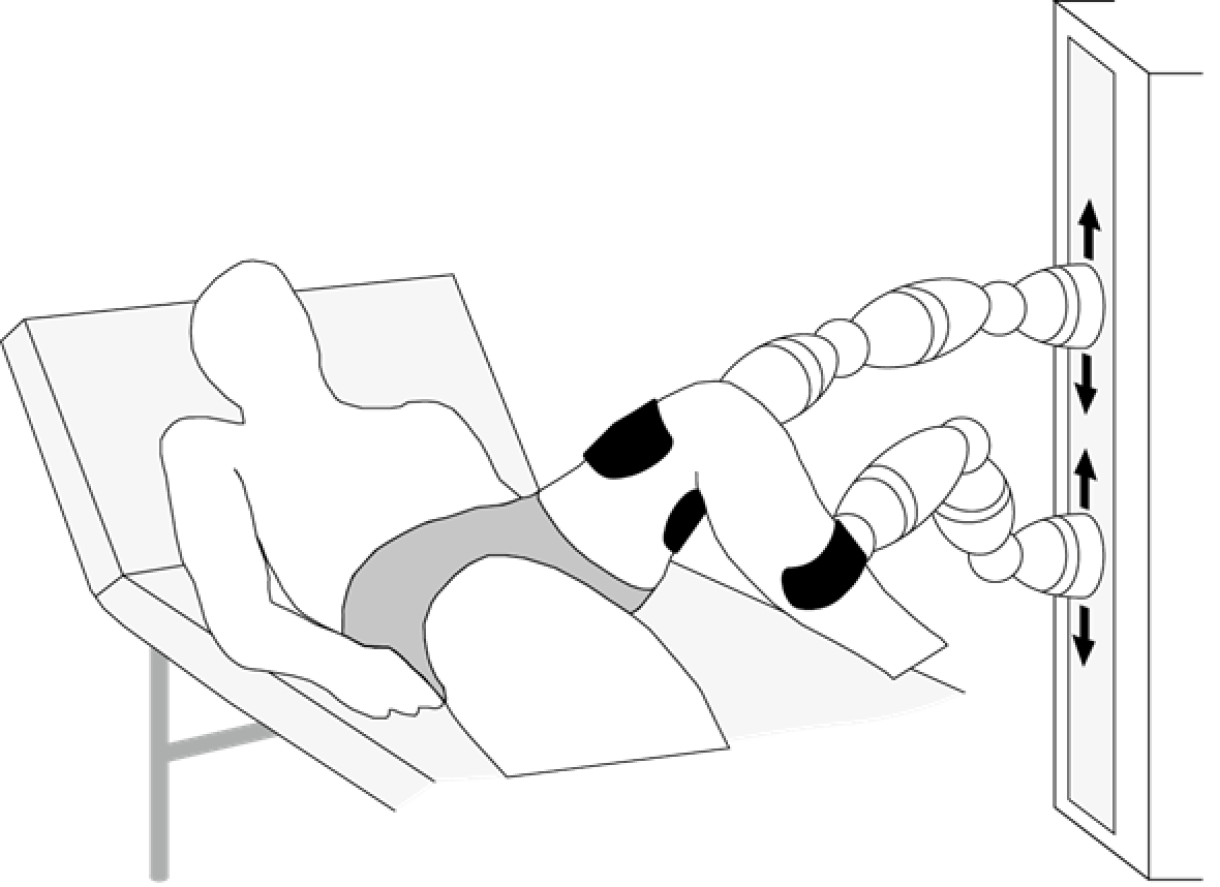
RobDIP – Robotisches System zur adaptiven Diagnose, Prävention und Rehabilitation von Knieschmerzen und Knieoperationen
Das Ziel des Projektes „RobDIP“ ist die Erforschung eines neuartigen Robotersystems zur Diagnose und Rehabilitation von Knieproblemen. Dieses robotische System soll mit dem Patienten während der Diagnose, Therapie und Rehabilitation in Wechselwirkung stehen.
Um das Projektziel zu erreichen, ist mit einem Roboter die sehr individuelle Achse des Kniegelenks zu bestimmen, welche für den behandelnden Arzt meist nur eingeschränkt erfassbar ist. Bestehende Systeme können die Knieachse nur durch Marker auf der Haut aufnehmen. Weil die Haut sich jedoch relativ zum Knochen bewegen kann, sind diese Systeme zu ungenau. Erforscht wird daher ein neuartiger Algorithmus, der zur taktilen und nichtinvasiven Ermittlung der Achse dient. Als Ansatz wird die Methode der „direkten Vektoriteration“ (Krylov-Methode) verfolgt, die auf einem mit best paper award ausgezeichnetem Paper basiert.
Durch die Erfassung der individuellen Achse des menschlichen Kniegelenkes lassen sich therapeutische Behandlungen besser planen. Der Vergleich mit einem gesunden Kniegelenk ermöglicht Maßnahmen in der Prävention, Therapie und Rehabilitation von Kniegelenksbeschwerden. Außerdem können bisher unbekannte Bewegungsabläufe entdeckt werden.
Partner:
• Battenberg ROBOTIC (Marburg)
• Klinik für Orthopädie und Orthopädische Chirurgie der Universität des Saarlandes (Homburg)
Details:
• Laufzeit: 01.05.2020 bis 30.04.2023
• Fördergeber / Förderkennzeichen: VDI/VDE Innovation + Technik GmbH/ 16SV8516

Physikalischer Kuka KR 500 Bewegungssimulator
Herkömmliche Bewegungssimulatoren benutzen Parallelplattformen zur Darstellung gemessener oder simulierter Beschleunigungen. Serielle Roboter bieten einen größeren Arbeitsraum, der für Überschlagssimulationen eingesetzt werden kann. Im vorliegenden Projekt wird ein industrieller KR 500 TÜV Roboter verwendet.
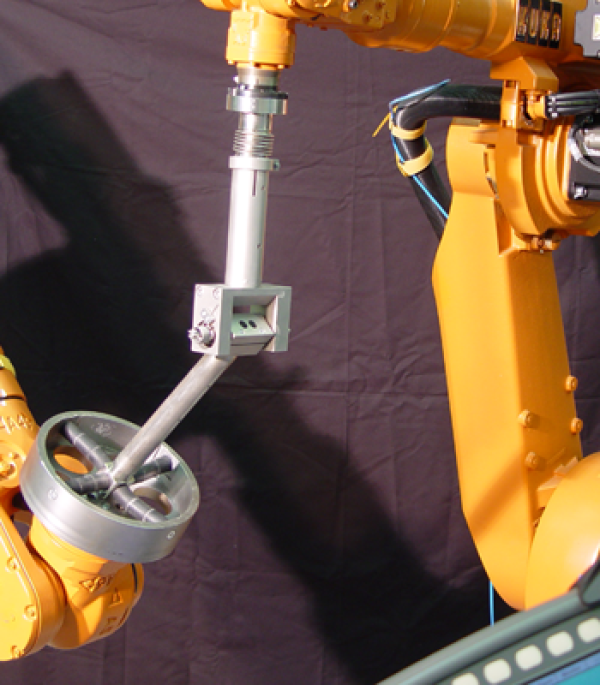
Bestimmung innerer Achsen mit kooperierende Robotern
Ziel dieses Projektes ist die kraftgeregelte Bewegung zweier Industrieroboter, so dass sie die unbekannte Bewegungsachse eines Mechanismus nichtinvasiv bestimmen können. Eine mögliche Anwendung ist die Bestimmung der Flexions/Extensionsachse des Ellbogens. Im Projekt werden Kuka-Roboter mit RSI-Steuerung und ein Ersatzmechanismus verwendet, der aus Gelenken und elastischen Elementen besteht.
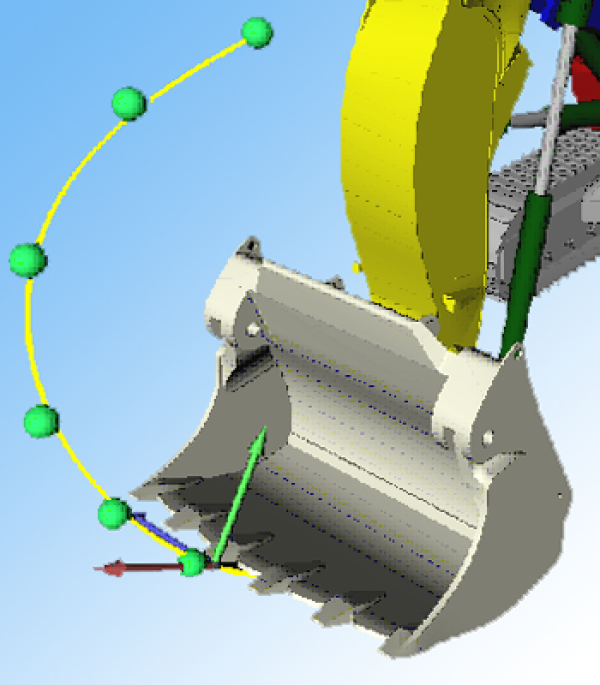
IntelliSpline: Bahnplanung mit dynamischen Nebenbedingungen
Dieses Projekt behandelt die Einbindung optimierter, quintischer Splinekurven in objektorientierte Mehrkörpersimulationsumgebungen. Anwendungen ergeben sich in der Roboterbahnplanung, im Achterbahnentwurf und in der Automatisierungstechnik.

FAROMIR – Autonomes medizinisches Assistenzrobotersystem
Aufgrund des demographischen Wandels, spielt es heutzutage eine immer größere Rolle, älteren Menschen ein eigenständiges und selbstbestimmtes Leben zu ermöglichen oder Patienten rund um die Uhr zu betreuen. Autonome Roboter-Systeme können aufgrund technischer Innovationen mehr und mehr in diesen alltäglichen Situationen eingesetzt werden und den Menschen entlasten. Der medizinische Assistenzroboter FAROMIR (www.faromir.de) bietet hierzu die Möglichkeit, den Gesundheitszustand des Patienten autonom und tageszeitunabhängig zu beobachten. Die Beaufsichtigung des Patienten kann sowohl in der eigenen Wohnung als auch in einer öffentlichen Einrichtung geschehen. Sollte dort ein Notfall eintreten, kann umgehend eine Rettungsleitstelle hinzugezogen werden. FAROMIR siedelt sich im Pflege- und Krankenhaussektor an und kann hier im Bedarfsfall Informationen über den Patienten an eine Leitzentrale übermitteln. In Situationen, bei denen es auf Sekunden ankommt, wird so die erforderliche Hilfe gerufen oder einem Arzt, unter Einbeziehung eines Kamerabildes, die Kommunikation mit dem Patienten ermöglicht. Features: eigenständige Identifizierung von Notfällen, identifizierung verletzter Menschen, Skelett-Parametrierung und Erkennung der Bewegungsmuster, Handzeichen Identifizierung, Spracherkennung über Richtmikrofon, Kommunikation bei Bedarf mit einer Rettungsleitstelle, statische und dynamische Umgebungserkennung. In Kooperation mit dem Lehrstuhl für Mechatronik, Fertigungstechnik und der Innovationsfabrik der UDE.