Bekanntmachungen - Announcements
Januar 2026 Ausschreibung Tutorenstellen Wintersemester 2025/26
Die Stellenausschreibungen für Tutorenstellen für das Wintersemester sind veröffentlicht.
Details zur Bewerbung finden sie unter diesem Link.

Januar 2026 EFRE Projekte "Activity Regained" und "SmartPODS"
In der dritten Runde des Innovationswettbewerbs „Gesünder.IN.NRW“ wurden zwei Projekte des Lehrstuhls für Mechanik und Robotik bewilligt:
- Im Projekt Activity Regained wird ein System zur objektivierten Bewertung des Chronic Fatigue Syndroms entwickelt, welches aus einem klinischen Trainingsparcours, Biosensoren sowie einem KI-gestützten Diagnostikmodell besteht. Durch die empirische Bewertung des Ermüdungs- und Regenerationszustands wird die Grundlage für eine bedarfsgerechte und individuelle Therapiesteuerung gelegt.
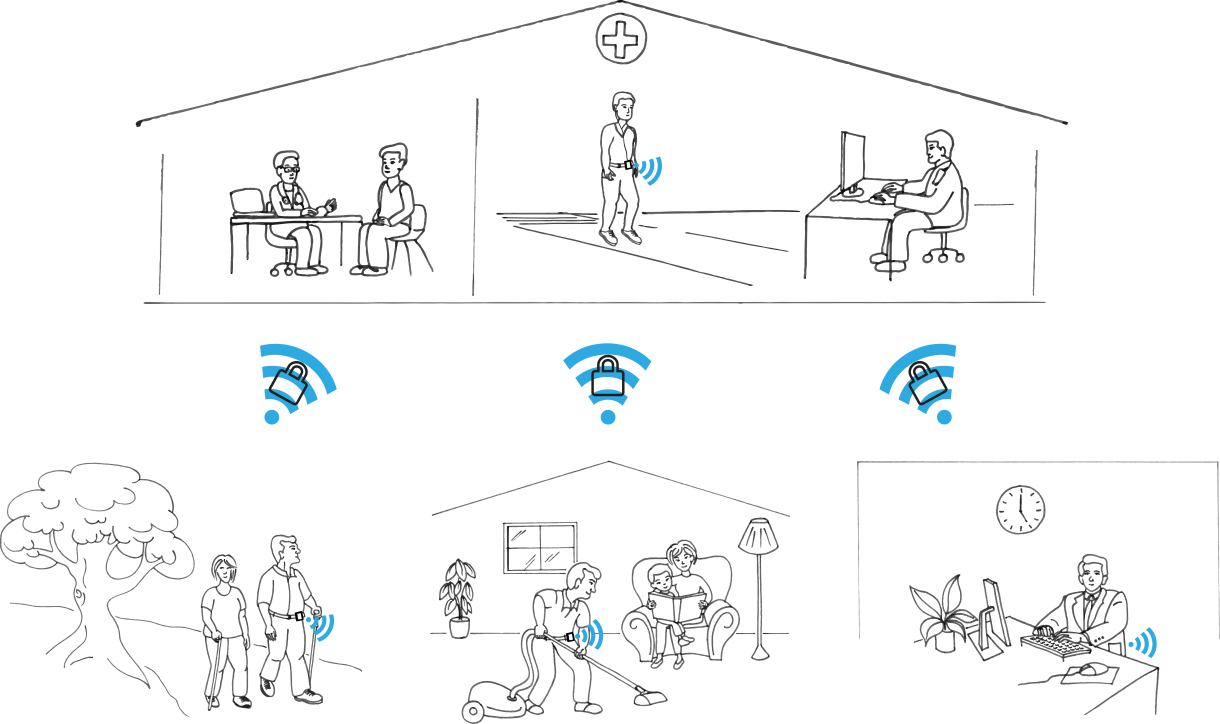
- Das Projekt SmartPODS zielt auf die telemedizinische Unterstützung der Rehabilitation nach orthopädischen Operationen ab. Das intelligente, tragbare Decision-Support-System liefert klinisch direkt interpretierbare Patientendaten und soll die Reha zuhause engmaschig und individuell begleiten und somit dauerhaft verbessern.
Dezember 2023 Kurzvortragspreis DGNR Tagung 2023
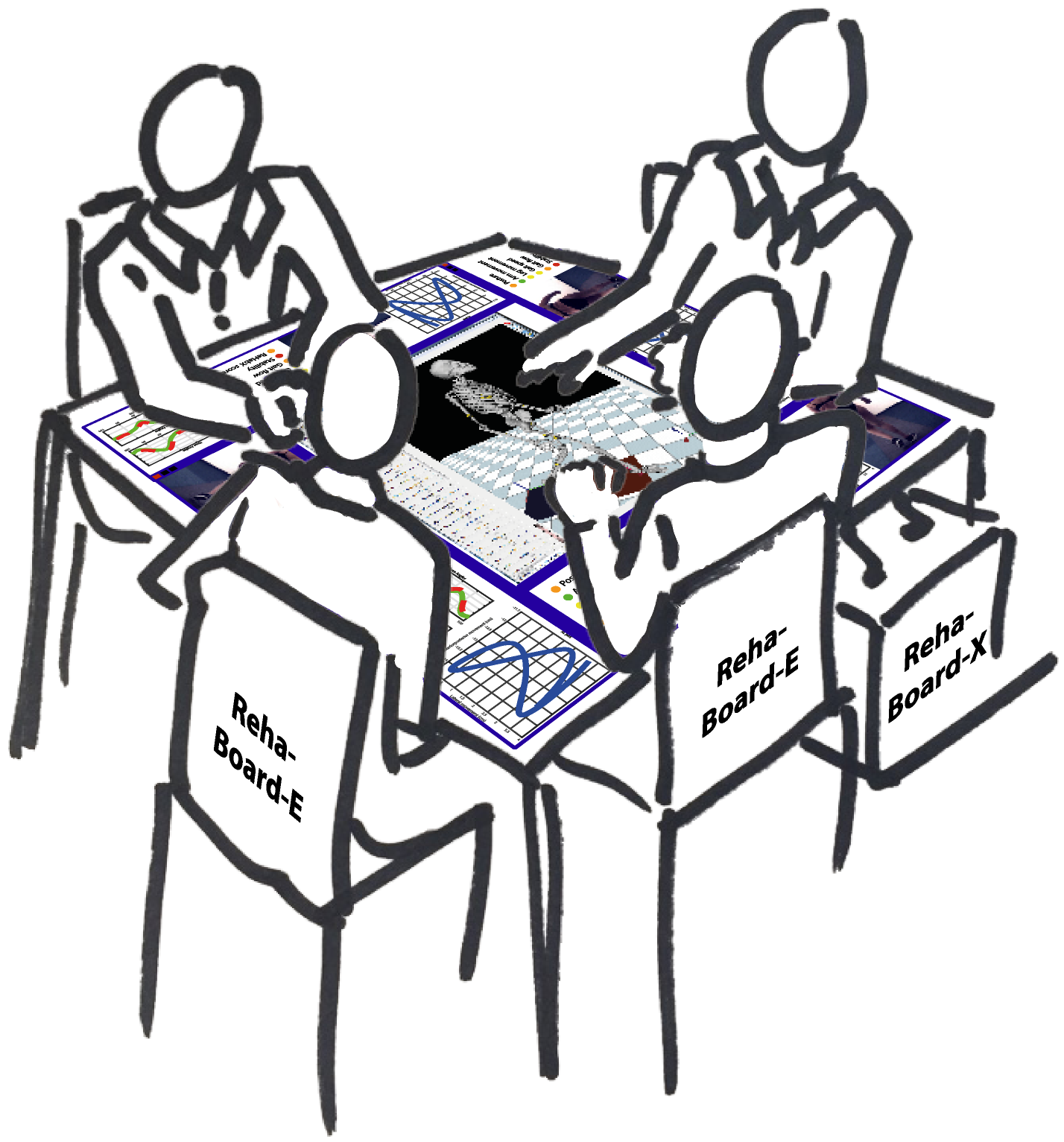
Der Beitrag "Interdisziplinäre Gangbeurteilung von Schlaganfallpatienten mittels erklärbarer KI – Ist ein fachlicher Austausch mit einem KI-Assistenzsystem denkbar?" von J.C. Liaw, D. Raab, M. Weber, H. Hefter, D. Zietz, M. Jäger, A. Kecskeméthy, F. Geu Flores und M. Siebler wurde auf der Jahrestagung der Deutschen Gesellschaft für Neurorehabilitation e.V. 2023 mit dem Kurzvortragspreis ausgezeichnet. Vortragender war Mario Siebler.
Der Beitrag ist im Kontext des Projektes RehaBoard entstanden. Weiterführende Informationen zu diesem Projekt finden Sie hier.
September 2023 BMBF-Projekt "Post-COVID E-Doc"
Seit der Corona-Pandemie gibt die komplexe Erkrankung Post-COVID Betroffenen und Behandelnden Rätsel auf. Eine geplante interaktive Plattform mit dem Namen „Post-COVID E-Doc“ soll bald dabei helfen, die Versorgung von Post-COVID-Betroffenen zu verbessern und dem behandelnden Personal neue, wichtige Erkenntnisse liefern.
Das vom Bundesministerium für Bildung und Forschung (BMBF) geförderte Verbundprojekt „Post-COVID E-Doc“ ist ein gemeinsames Forschungsvorhaben der MEDICLIN Reha Research, der MediClin GmbH & Co. KG, der Universität Duisburg-Essen, der Rheinisch-Westfälischen Technischen Hochschule Aachen und der Minddistrict GmbH.
„Ziel des Projektes ist es, gemeinsam mit den Kooperationspartnern eine innovative, selbstlernende und interaktive Plattform zu entwickeln, die Post-COVID-Betroffenen dabei hilft, ihre Symptome zu deuten und geeignete Maßnahmen zu wählen. So soll die Gesundheitsversorgung von Post-COVID-Betroffenen verbessert werden“, berichtet Dr. York Dhein, Geschäftsführer vom Konsortialführer MEDICLIN Reha Research. Das BMBF fördert das Projekt im Rahmen des Forschungsprogramms zu Interaktiven Technologien für Gesundheit und Lebensqualität „Miteinander durch Innovation“ von September 2023 bis August 2025.
Weiterführende Informationen zu dem Projekt Post-COVID E-Doc finden Sie hier.

Februar 2022 Neue Roboterzelle in Betrieb genommen
Der Lehrstuhl für Mechanik und Robotik konnte am 10.02.2022 seine neue Roboterschulungszelle in Betrieb nehmen. Die Zelle ist mit neuster Sicherheitstechnik und einem modern KUKA KR6-Roboter ausgestattet und ersetzt die fast 20 Jahre alte Vorgängerzelle, die nicht mehr den aktuellen Standards entsprach. Wie auch schon ihre Vorgängerin soll die neue Zelle für studentische Praktika und Studienarbeiten sowie für die Öffentlichkeitsarbeit der Universität eingesetzt werden. Die CE-geprüfte Zelle bietet dabei allen Interessierten einen Einblick in die moderne Robotik.
Wir bedanken uns sehr herzlich bei der ITQ GmbH, die uns bei der Einrichtung der Zelle unterstützt hat, sowie bei der Universität Duisburg-Essen, die diese neue Anlange im Rahmen des Investitionsprogrammes für Anlagen in der Lehre gefördert hat.
Februar 2021 Publikumspreis bei der IFToMM D-A-CH Konferenz 2021
Der an unserem Lehrstuhl erstellte Beitrag „Ganganalyse von Schlaganfallpatienten mittels Hauptpunkte und -strecken" von Svenja Stutzmann, Jin Cheng Liaw, Francisco Geu Flores, Volkert van der Wijk und Andrés Kecskeméthy wurde auf der 7. IFToMM D-A-CH Konferenz mit dem "Publikumspreis" ausgezeichnet.
Link zum Beitrag: https://doi.org/10.17185/duepublico/74046
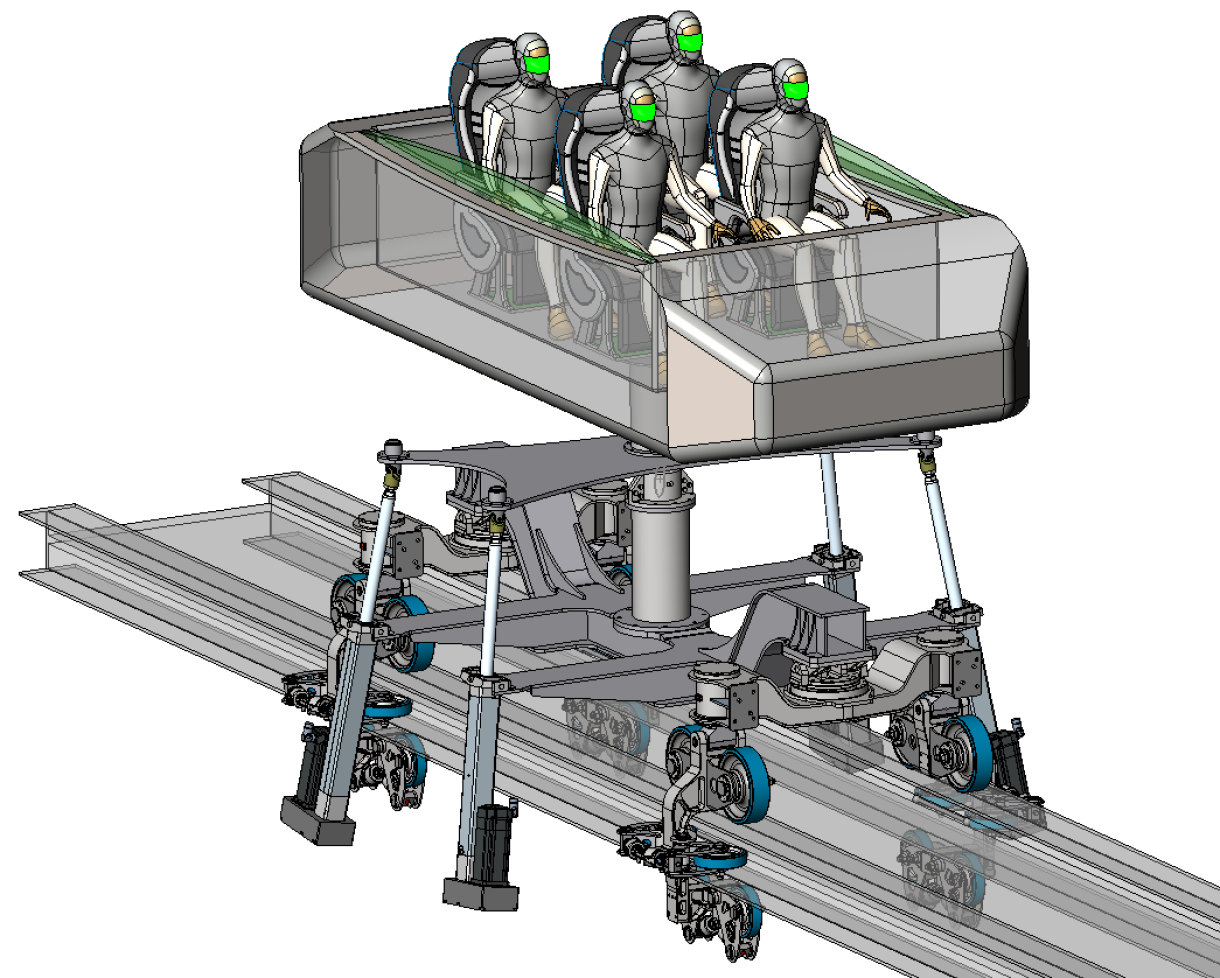
August 2020 ZIM-Projekt “Entwicklung eines schienengeführten Mehrachssimulators”
Im Rahmen des vom ZIM (Zentrales Innovationsprogramm Mittelstand) geförderten Projektes “Entwicklung eines schienengeführten Mehrachssimulators” wird in Zusammenarbeit mit der Beutler Transport Systeme GmbH ein neuartiger Amusement Ride entwickelt, der die bisherigen Technologien einer schienengeführten Achterbahn mit einer roboterarmgeführten Plattform auf begrenztem Raum kombiniert. Hierzu wird eine roboterarmgeführte Plattform auf einer Schiene bestehend aus einen kompakten, kleinen Rundkurs mit engen Kurven, Kuppen und Wannen platziert und auf dieser bewegt. Durch Veränderungen Geschwindigkeit sowie der Positionierung der Plattform über den Roboterarm wird jede Runde eine andere Kraft / Beanspruchung auf den Fahrgast einwirken, so dass für ihn nicht der Eindruck besteht, er würde sich auf einem kleinen Rundkurs befinden. Hiermit soll den Fahrgästen ein täuschend echtes Fahrgefühl eines langen Fahrkurses mit extremen Manövern vermittelt werden, ohne dabei physisch diesen Kurs wirklich (komplett) zu durchfahren. Die Stimulation der visuellen Reize erfolgt dabei über eine VR-Brille, wobei je nach Klientel die Bahn mit unterschiedlichen Geschwindigkeiten und eingeblendeten Filmen erfolgen kann. Das Projekt läuft von August 2020 bis September 2023.
Oktober 2019 EU-Projekt RehaToGo
Der Lehrstuhl für Mechanik und Robotik ist mit dem Projekt „RehaToGo - Ein mobiles Messsystem zur Rückkopplung von Alltagsbewegungen für optimiertestationäre Therapieentscheidungen bei gangmotorischen Störungen“ einer von zwölf Gewinnern des Leitmarktwettbewerbs "Gesundheit.NRW". Vom 01.10.19 bis zum 30.09.22 werden in diesem Projekt neue Methoden erforscht, um qualitative und quantitative Beurteilungen der menschlichen Motorik zu ermöglichen.
Weiterführende Informationen finden Sie unter diesem Link.

August 2019 Asklepios Award für Forschungsprojekt "RehaBoard"
Der Asklepios Award 2019 in der Kategorie ‚Innovation‘ ging in diesem Jahr an das Forschungsprojekt "RehaBoard". In diesem Projekt werden - unter Beteiligung des Lehrstuhls für Mechanik und Robotik - seit zwei Jahren neue interdisziplinäre ganzheitliche Behandlungsaspekte für die personalisierte Therapiesteuerung bei Gangstörungen nach Schlaganfall erforscht, mit dem Ziel evidenzbasiert wenig erfolgversprechende und kostenintensive Therapiemaßnahmen zu vermeiden und auf den Patienten zugeschnittene „Multi“-Therapien personalisiert zu gestalten. Der Asklepios Award würdigt diesen innovationen Ansatz zur Verbesserung des Therapieerfolges bei Schlaganfallpatienten.
Die vollständige Pressemitteilung lesen Sie hier.
Weiterführende Informationen zum Projekt RehaBoard finden Sie hier.

Juli 2019 ECCOMAS Multibody 2019
Als Ausrichter der internationalen Konferenz ECCOMAS Multibody 2019 durfte der Lehrstuhl für Mechanik und Robotik führende Forscher aus den Bereichen Mehrkörpersimulation, Robotik, Mechatronik und Biomechanik an der Universität Duisburg-Essen begrüßen. Es war eine große Ehre, dass Duisburg nach Metropolen wie Prag, Brüssel, Warschau und Madrid von der European Community on Computational Methods in Applied Sciences (ECCOMAS) für die Ausrichtung der biennalen, viertägigen Konferenz zum Thema Mehrkörperdynamik ausgewählt wurde. Den 245 Teilnehmern aus 24 Ländern wurde ein abwechslungsreiches Programm, bestehend aus vielfältigen wissenschaftlichen Vorträgen und reizvollem regionalen Rahmenprogramm, präsentiert.

Juni 2019 Best Research Paper Award im Bereich Mehrkörperdynamik
Das an unserem Lehrstuhl erstellte Paper „Minimal Coordinate Multibody Dynamics of Rolling Surfaces Using Surface Joints“ von Alina Stepken und Francisco Geu Flores wurde auf dem 15. IFToMM World Congress in Polen mit dem “Best Research Paper Award” im Bereich Mehrkörperdynamik ausgezeichnet.

April 2019 ZIM-Projekt „Wasserrutsche“
In dem vom ZIM (Zentrales Innovationsprogramm Mittelstand) geförderten Projekt „Entwicklung einer Echtzeit-gesteuerten Rutsche mit dynamischen Steuerelementen zur Geschwindigkeitsregelung und Entwicklung eines effizienten Rutschen-Simulationstools mit Wassermodell“ arbeitet der Lehrstuhl für Mechanik und Robotik mit den zwei Unternehmen Wiegand.waterrides GmbH (SlideWheel - Wasserrutsche) und Gerstlauer Amusement Riders GmbH zusammen. Hierbei soll im Zeitraum von Februar 2019 – Juli 2021 eine Rutsche entwickelt werden, die sich dynamisch mit Hilfe von aktiven Steuerelementen dem Rutschenden anpasst, sodass stets das vom Rutschenden gewählte Rutscherlebnis erreicht wird.

April 2019 ZIM-Projekt “AnLauf”
Das vom ZIM (Zentrales Innovationsprogramm Mittelstand) geförderte Projekt „AnLauf - Analyse von Gelenkbelastungen im Laufsport mit Inverser Dynamik“ stellt eine Zusammenarbeit zwischen den Unternehmen 2D Debus & Diebold Meßsysteme GmbH und Starringer Bekleidung GmbH sowie den Forschungseinrichtungen der Professur für Bewegungswissenschaft der Technischen Universität Chemnitz und dem Lehrstuhl für Mechanik und Robotik der Universität Duisburg-Essen dar. Im Zeitraum von April 2019 bis Juli 2021 soll für den Laufsport ein Algorithmus entwickelt werden, der mithilfe der Daten zweier IMU-Sensoren, die während des Laufens mit einer Sensormanschette am Sprunggelenk des Anwenders befestigt sind, Gelenkbelastungen der unteren Extremitäten ermittelt und bewertet. Daraus resultierend erhält der Anwender über eine App relevante Informationen zur Verbesserung seines Laufstils.
Juli 2017 EU-Projekt RehaBoard
Der Lehrstuhl für Mechanik und Robotik ist mit dem Projekt „RehaBoard - Ein Computerassistenz-System für die Behandlungsplanung bei Gangstörungen nach Schlaganfall“ einer von neun Gewinnern des Leitmarktwettbewerbs "LifeSciences.NRW 2016". Seit dem 01.07.18 werden in diesem Projekt neue interdisziplinäre ganzheitliche Behandlungsaspekte für die personalisierte Therapiesteuerung bei Gangstörungen nach Schlaganfall erforscht.
Weiterführende Informationen finden Sie unter diesem Link.

Juli 2017 Innovationspreis für beste Abschlussarbeit
Unsere Mitarbeiterin Bettina Weber wurde in diesem Jahr neben dem VDI-Förderpreis auch mit dem Innovationspreis der Sparkasse am Niederrhein für ihre hervorragende und anwendungsbezogene Masterarbeit in 2016 auf dem Gebiet der Ingenieurwissenschaften ausgezeichnet. Die vom Förderverein Ingenieurwissenschaften Universität Duisburg-Essen e. V. beauftragten Gutachter sahen die an unserem Lehrstuhl erstellte Abschlussarbeit von Bettina Weber und die Masterarbeit von Jan Birkmann (Lehrstuhl für Thermische Verfahrenstechnik, Universität Duisburg-Essen) als gleichwertig an und teilten den Preis auf.
Die Masterarbeit „Robust inverse kinematics using virtual redundant axes“ von Frau Weber beschäftigt sich mit einem neuen Verfahren zur Singularitätsvermeidung während des Betriebs von Knickarmrobotern. Erstmals wird ein positionsbasiertes Verfahren der Inversen Kinematik eingeführt, validiert und evaluiert, welches sich im Vergleich zu bestehenden Algorithmen auf Geschwindigkeitsebene durch eine genauere Bahnverfolgung, geringere Verletzungen der Benutzervorgaben und insgesamt eine robuste Positionskontrolle innerhalb von Singularitäten auszeichnet.
Pressemitteilungen:
Juni 2017 Zertifizierung von der Sektion Grundlagenforschung der DGOU e.V.
Der Lehrstuhl für Mechanik und Robotik der Universität Duisburg-Essen ist nun auch von der Sektion Grundlagenforschung der DGOU e.V. als Netzwerklabor im Forschungsnetzwerk MSB-Netnach den Richtlinien anerkannt worden.

April 2017 Unikids 2017
Um auch schon den Kleinen die Universität und die verschiedenen Forschungsbereiche näher zu bringen, findet an der Universität Duisburg-Essen seit 2013 die Veranstaltung „Unikids“ statt. Hier wird den Kindern ein Teil des Alltags an der Universität in unterschiedlichen Fachbereichen in Form von kleinen, auf die Kinder zugeschnittene Vorlesungen präsentiert. In diesem Jahr hat sich auch unser Lehrstuhl mit der Veranstaltung „Industrieroboter – Wie funktionieren sie und wo werden sie eingesetzt?“ an der Veranstaltung beteiligt. Hierbei hat Prof. Kecskeméthy die vielen Facetten der Industrieroboter in einer für die Kinder verständlichen Weise dargestellt. Von der Geschichte der Roboter bis hin zu den verschiedenen aktuellen Anwendungsfällen wurde fast jeder Bereich beleuchtet und von den Kindern interessiert aufgenommen. Außerdem lud die Vorlesung auch zum Mitmachen und Staunen ein. Unter anderem konnten die Kinder die „Sekteinschänkenden Roboter“ James und Sophie welche durch die Mithilfe von Sebastian Röttgermann (Leitung Roboterlabor LMR) und Markus Borchert (wissenschaftl. Hilfskraft Robotiklabor LMR) in den Hörsaal transportiert und programmiert wurden in „Lebensgröße“ bestaunt werden. Weiterhin konnte ein Roboter der Firma „Universal Robots“ unter freundlicher Anleitung von Sven Krüger (Mitarbeiter Universal Robots) durch die kleinen Forscher selbst programmiert werden. Klar, dass hier im Anschluss an die Veranstaltung viele Fragen der Kinder beantwortet werden mussten und der Wissenshunger fast nicht gestillt werden konnte.
Bilder zur Veranstaltung finden Sie in der Galerie.
März 2017 Hochschulpartnerschaft Griechenland:
Perspectives for Control of Complex Robots
Ziel der vorliegenden Hochschulpartnerschaft mit Griechenland ist es, eine gemeinsame Plattform für die Ausbildung von Studierenden der Universitäten Duisburg-Essen und National Technical University of Athens auf dem Gebiet der Modellbildung und experimentellen Regelung komplexer robotischer Systeme aufzubauen. Grundidee der Partnerschaft besteht darin, die international stark positionierten theoretischen Methoden der Kinematik und Dynamik komplexer mechatronischer Systeme an der Universität Duisburg-Essen mit der technologisch hoch entwickelten experimentellen Umgebung für zukünftige robotische Technologien wie Schreitmechanismen und künstliche Vierbeiner an der NTUA zu kombinieren, um damit ein virtuelles gemeinsames Labor mit zwei Standorten und gemeinsamen Komponenten der Curricula im Fachbereich Mechatronik/Robotik zur Verfügung zu stellen, an dem Studierende beider Standorte ausgebildet und trainiert werden.
Nähere Informationen über das Programm finden Sie unter diesem Link.
Das Projekt wird gefördert durch den Deutschen Akademischen Austauschdienst (DAAD) im Programm Hochschulpartnerschaften Griechenland unter der Projekt-ID HPG16-57340347.
März 2017 Besuch im Roboterlabor
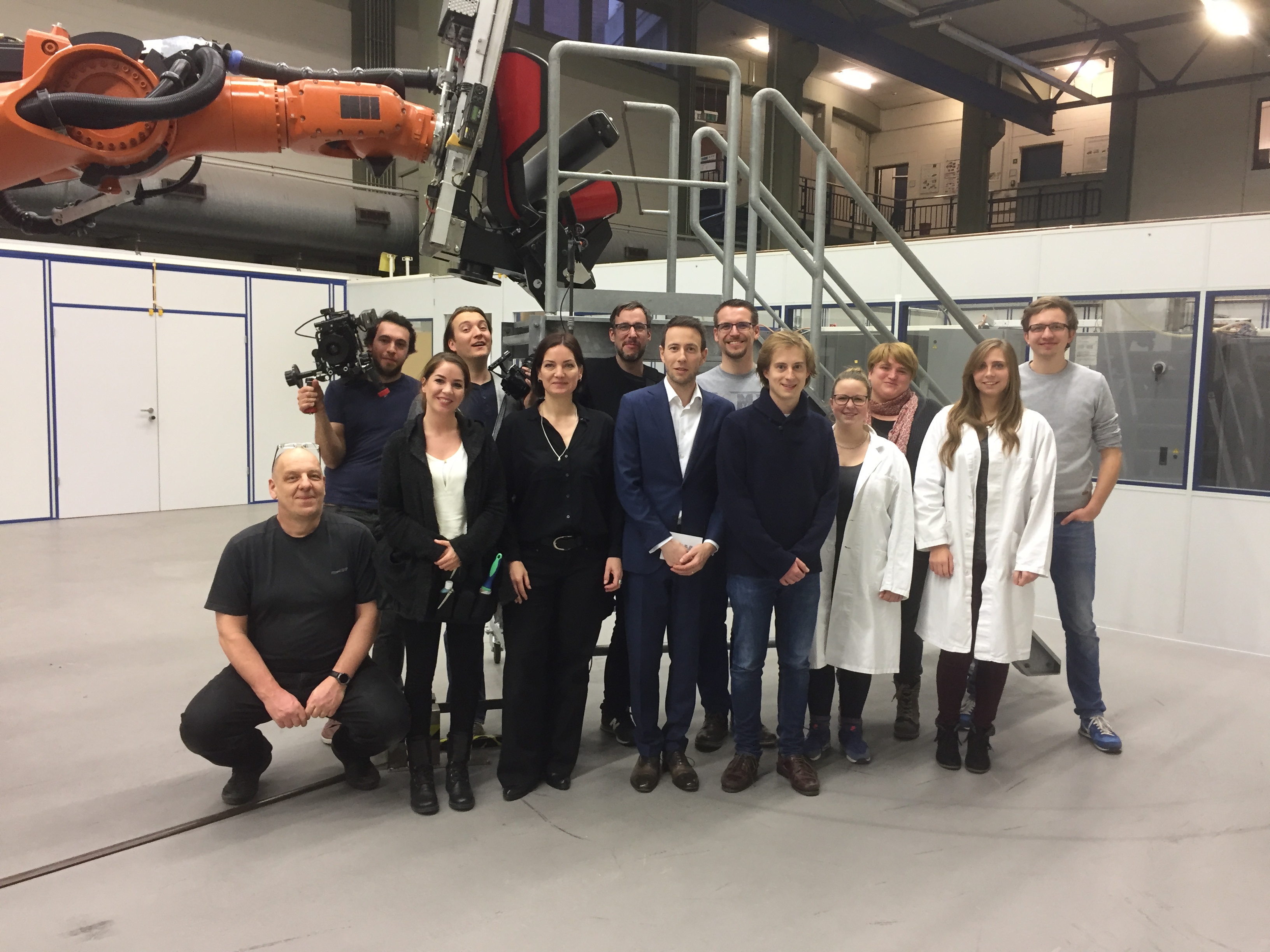
Am 01.03.2017 hatten wir Besuch von der Firma CPP Studios GmbH. An diesem Tag war unser RoboCoaster Teil eines Filmdrehs für die IBM Research Challenge bei der ein Wissenschaftler von IBM unseren unermüdlichen RoboCoaster kennenlernen durfte. Die Organisation und Betreuung rund um die Filmaufnahmen erfolgten durch unseren wissenschaftlichen Mitarbeiter Sebastian Röttgermann, sowie seine studentische Hilfskraft Markus Borchert. Weiterhin waren zwei unserer Studentinnen (Leonie Nieradzik und Alina Stepken) als Statisten bei den Filmaufnahmen vertreten.

März 2017 VDI-Förderpreis für die beste Abschlussarbeit
Die am Lehrstuhl für Mechanik und Robotik erstellte Masterarbeit von Frau Bettina Weber „Robust inverse kinematics using virtual redundant axes“ wurde mit dem Förderpreis des VDI Ruhrbezirksvereins e.V. für die besten Abschlussarbeiten 2016 ausgezeichnet.
Frau Weber hat erstmals ein neues positionsbasiertes Verfahren zur Singularitätsvermeidung während des Betriebs von Knickarmrobotern vorgestellt und in Bezug auf die Vermeidung von Ellbogensingularitäten validiert. Durch die sogenannte virtual redundant axis Methode wird im Vergleich zu geschwindigkeitsbasierten Verfahren eine präzisere Erreichung der gewünschten Zielposition ermöglicht, ohne dass der Roboter in Instabilitäten verfällt.

November 2016 Achterbahn-Looping mit dem Roboter in der Uni-Werkstatt
Die Westdeutsche Allgemeine Zeitung (WAZ) berichtete vor kurzem über Achterbahnsimualtions-Roboter des LMR, sowie den Forschungsschwerpunkt der Biomechanik an unserem Lehrstuhl.
Den Link zum vollständigen Artikel auf der Homepage der WAZ finden sie hier.
Quelle des Artikels: WAZ Duisburg, Stefan Ahlers, 29.11.2016,

Juli 2016 Innovationspreis für beste Abschlussarbeiten
Die an unserem Lehrstuhl erstellten Abschlussarbeiten von Andreas Scholz und Stefan Westermaier wurden mit dem Innovationspreis der Sparkasse am Niederrhein für die besten Abschlussarbeiten 2015 ausgezeichnet. Die Preisträger wurden in enger Kooperation mit dem Gutachtergremium des Fördervereins Ingenieurwissenschaften Universität Duisburg-Essen e. V. ausgewählt.
Herr Scholz erhielt den Preis für seine Dissertation “Fast Differential-Geometric Methods for Continous Muscle Wrapping Over Multiple General Surfaces”. Er hat ein neues mathematisches Verfahren zur Berechnung der Verläufe von Muskeln, Sehnen und Bändern im menschlichen Körper entwickelt. Das Verfahren ermöglicht tiefere Einblicke in die Mechanik menschlicher Bewegungsabläufe und ist damit u.a. für die Behandlung von Erkrankungen des Bewegungsapparates, z.B. nach einem Schlaganfall, von Nutzen.
Herr Westermaier wurde für seine Masterarbeit „Entwicklung von patientenindividuellen Mehrkörpermodellen und FEM Analysen zur Behandlungsoptimierung von femoroacetabulärem Impingement“ ausgezeichnet. Die erarbeitete Lösung ermöglicht eine dreidimensionale Darstellung der knöchernen Bewegungsfreiheit auf Basis der MRT-Aufnahmen eines Patienten. Dadurch kann die Hüftkopfarthrose verursachende Krankheit zukünftig besser verstanden und behandelt werden.

Juli 2016 Helmut und Gerlinde Schwarz-Stiftung Förderpreis
Die Auswahlkommission hat im Juli 2016 entschieden, den diesjährigen Förderpreis der Helmut und Gerlinde Schwarz-Stiftung an unseren Mitarbeiter Herrn Ulrich Unterberg für seine außerordentlichen wissenschaftlichen Leistungen im Bereich der Biomechanik und Robotik zu vergeben.

Juli 2016 LMR in Peru
Aktuell absolvieren zwei Absolventen des Lehrstuhls für Mechanik und Robotik, Bettina und Malte Weber, einen dreimonatigen Post-Master Auslandsaufenthalt an der in Lima befindlichen privaten Universität PUCP (Pontificia Universidad Católica del Perú), eine der renommiertesten Universitäten in ganz Peru mit ca. 20.000 Studenten. Ermöglicht wird dies finanziell durch ein Teilstipendium der ERASMUS+ Auslandsförderung, die aus Mitteln der Kommission der Europäischen Union unter der Vereinbarung eines Learning Agreements zur Verfügung gestellt wird und der Deckung von Kosten für Reise, Lebensunterhalt und Sprachvorbereitung dient. Vordergründiges Ziel ist dabei sowohl der internationale Kooperationsausbau zwischen den mechatronischen Lehrstühlen der PUCP und der Uni DUE als auch das Kennenlernen der peruanischen Kultur und Arbeitsweise.
Vor Ort arbeiten die beiden im ingenieurwissenschaftlichen Laboratorium der mechatronischen Fakultät unter der Leitung von Prof. Dante Angel Elias Giordano und unter stetiger hiesiger fachlicher Unterstützung durch den LMR an einem Projekt bezüglich der kinematischen Analyse einer Torschuss-Situation im Fußball. Mittels IMU-Bewegungssensoren und der lehrstuhleigenen Software MobileBodySDK erfolgt eine sensorbasierte Datenermittlung und –auswertung, u. a. im Hinblick auf die Untersuchung möglicher Korrelationen zwischen der Fuß- bzw. Beinstellung und der entsprechenden Schusspräzision.
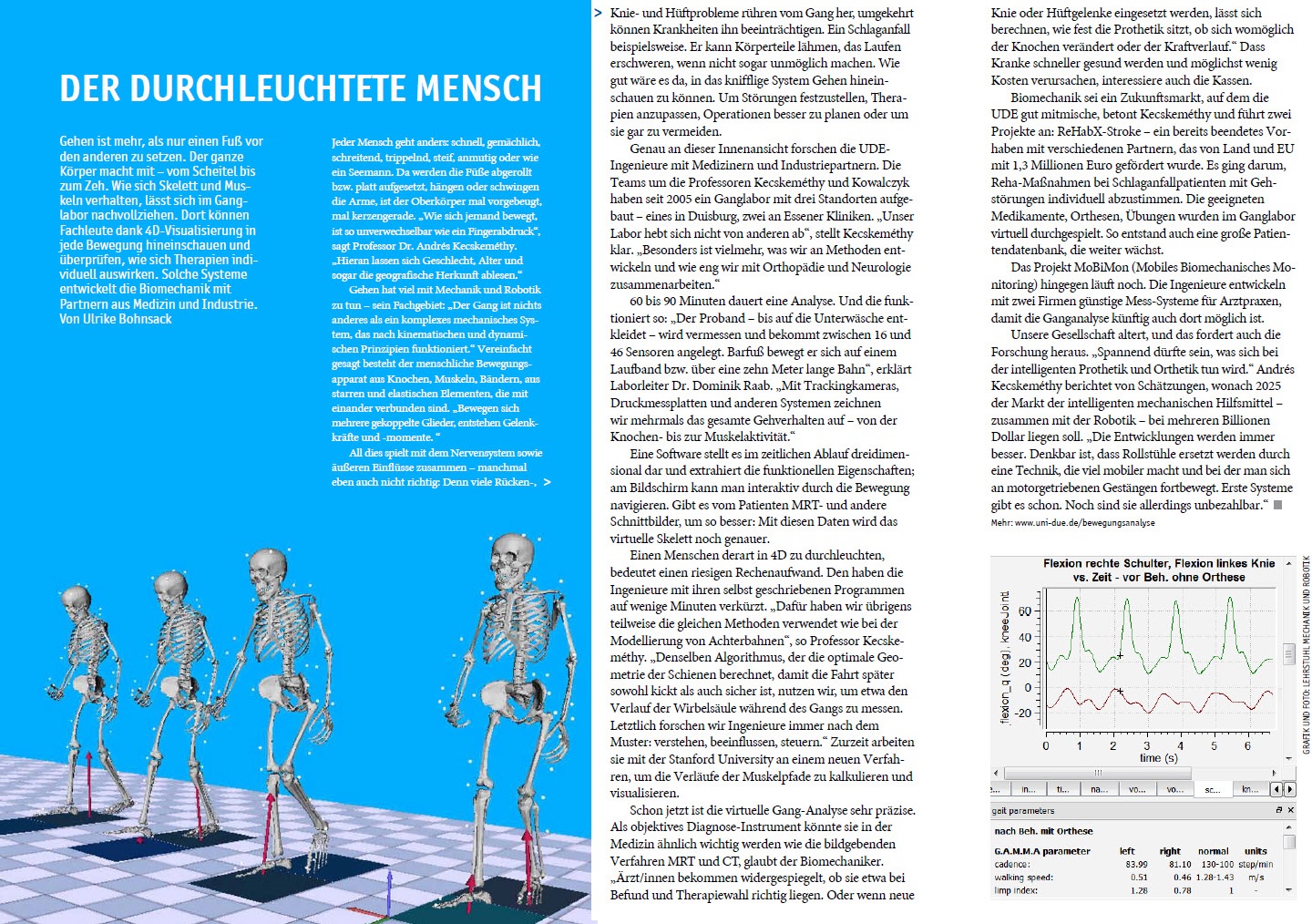
April 2016 Der durchleuchtete Mensch
In der ersten Ausgabe des Campusreports im Jahr 2016 der Universität Duisburg-Essen wurde ein Artikel über die Arbeitsgruppe von Herrn Professor Kecskeméthy veröffentlicht. Der Artikel befasst sich unter anderem mit der vom Lehrstuhl für Mechanik und Robotik betriebenen Forschung im Bereich der Instrumentellen Bewegugnsanalyse. Den Auszug aus dem Campusreport finden Sie hier.
Februar 2016 VDI Förderpreis für beste Abschlussarbeiten
Die an unserem Lehrstuhl erstellte Bachelorarbeit von Herrn Lior Fuks „Estimation of internal load distributions using integrated image processing algorithms“ wurde mit dem Förderpreis des VDI Ruhrbezirksverein e.V. für die besten Abschlussarbeiten 2015 ausgezeichnet.
Herr Fuks hat an einem System gearbeitet, das die Bilderkennungsalgorithmen mit den Algorithmen der Finite-Elemente-Methode koppelt. Diese innovative Lösung ermöglicht echtzeitnahe Berechnungen von Deformationen und Spannungen in diversen Tragstrukturen sowie Maschinenbauteilen.

Februar 2016 Schülerinfotag – Laborführung LMR
Wie auch in den vergangenen Jahren hat sich der Lehrstuhl für Mechanik und Robotik am Schülerinfotag am 18.02.2016 mit einer Laborführung beteiligt. Unsere studentische Hilfskraft Markus Borchert hat hierbei die Roboter des Lehrstuhls sowie unseren physikalischen Bewegungssimulator RoboCoaster vorgestellt.
Ein Artikel zum Schülerinfotag findet sich in der WAZ Duisburg vom 19.02.2016. Für weitere Informationen zu unseren Projekten am physikalischen Bewegungssimulator sowie den Industrierobotern wenden Sie sich bitte an Herrn Röttgermann
Quelle des Artikels: WAZ Duisburg; Foto: Stephan Eickershoff

Dezember 2015 Auf den Hund gekommen
Der Lehrstuhl für Mechanik und Robotik befasst sich bereits seit 2003 mit der instrumentellen Bewegungsanalyse von motorisch beeinträchtigten Personen. Die durch zwei Ganglabore und Computersimulationen unterstützte Forschung trägt dazu bei, therapeutische Maßnahmen zu verbessern und dadurch die Lebensqualität gehbehinderter Menschen zu erhöhen.
Nun ist der bisherige Forschungsbereich um eine Stelle zur Bewegungsanalyse von Hunden erweitert worden.
Einen Link zum vollständigen Artikel aus dem Alumni-Newsletter finden Sie hier.
Oktober 2015 Frauen für Ingenieurwissenschaften
Der Lehrstuhl für Mechanik und Robotik unterstützt die geschlechteruntypischen Studienwahl durch Beteiligung an den Projekten Girls’ Day, S.U.N.I und MINT-Mix für Mädchen. Ende Oktober konnte zum Beispiel im Rahmen des MINT-Mixes Schülerinnen, die direkt nach dem Abitur noch kein Studium und keine Ausbildung begonnen haben, durch Besuch der Vorlesung „Technische Mechanik 1“ und einem Praktikum im Roboterlabor ein Einblick in das Studentenleben gegeben werden.
September / Oktober 2015 Leuchtplakate
Dass wissenschaftliche Forschung den Lebensalltag direkt berühren kann, zeigt die Universität Duisburg-Essen (UDE) jetzt plakativ an insgesamt 1.074 Standorten in Duisburg, Essen und am Düsseldorfer Flughafen.
Ab dem 15. September werden eine Woche lang 555 sogenannte City-Light-Poster, hinterleuchtete Plakate, an Bushaltestellen, vor Einkaufszentren und Parkhäusern die Passanten auf die Forschung der UDE aufmerksam machen. Der Lehrstuhl für Mechanik und Robotik stellt mit den Plakaten "Alltagsroboter" und "Ganglabor" dafür zwei von sechs Motiven, die Themen aus den Ingenieur- und Gesellschaftswissenschaften wie auch der Medizin in Szene setzen.
Um möglichst viele Menschen zu erreichen, geht die UDE mit den City-Light-Postern vom 27. Oktober bis zum 2. November nochmals in die Städte Duisburg und Essen.
August 2015 BMBF-Verbundprojekt „Steigerung der Energieeffizienz in Wassernetzen durch neue Beurteilungstools und optimierte Reinigung“
Damit Wasser sicher und damit auch energiesparend durch die Rohre laufen kann, müssen sie regelmäßig von Ablagerungen gereinigt werden. Der Lehrstuhl für Mechanik und Robotik ist zusammen mit RWW und Hammann GmbH an einem BMBF-Verbundprojekt (http://comprex.de/reiner/) beteiligt, das solche Reinigungsprozesse aus energetischer Sicht optimieren will. Durch neuartige Reinigungsstrategien und Überwachungsmethoden soll künftig flexibler auf Veränderungen in den Rohrsystemen reagiert werden können. Das Bundesforschungsministerium fördert das Projekt in den nächsten zwei Jahren mit insgesamt ca. 650.000 Euro.

November 2014 Expertentreffen für Gang- und Bewegungsanalyse
Die wissenschaftliche und klinische Arbeit von Laboren für instrumentelle Ganganalyse wird im deutschsprachigem Raum durch die „Gesellschaft für die Analyse Menschlicher Motorik in ihrer klinischen Anwendung“ (GAMMA) fokussiert, deren Jahrestagung 2014 für den Standort Duisburg gewonnen werden konnte. Unter der Leitung von Herrn Dr. Raab vom Lehrstuhl für Mechanik und Robotik fanden sich am 21. und 22. November 2014 rund 50 Ärzte, Physiotherapeuten, Sportwissenschaftler, Physiker und Ingenieure aus Deutschland, Österreich, der Schweiz und den Niederlanden zur Diskussion von aktuellen Forschungsergebnissen und Fallstudien aus dem Bereich der instrumentellen Gang- und Bewegungsanalyse am Campus Duisburg ein.
Weiterführende Informationen und Fotos zu dieser Veranstaltung sind zu finden unter www.uni-due.de/lmr/gamma2014
Januar 2014 DFG-Projekt – Untersuchung der Ablagerungen bei der Wasseraufbereitung
In einem neuen DFG-geförderten Projekt untersuchen Wassertechniker und Ingenieure gemeinsam, wie sich Filtermembranen frei von Ablagerungen und schädlichen Schichten halten lassen. Damit wollen sie die Trinkwasseraufbereitung optimieren.

März 2013 VDI Förderpreis für beste Abschlussarbeiten
Unsere Mitarbeiter Andreas Jürgens und Andreas Scholz wurden mit dem Förderpreis des VDI Ruhrbezirksverein e.V. für die besten Abschlussarbeiten 2012 ausgezeichnet.
Herr Jürgens erhielt den Preis für seine Diplomarbeit „Entwicklung eines Algorithmus zur Längsrisserkennung beim Stranggießen von Stahl und Implementierung als Überwachungsmodul in eine Online-Umgebung“, die er in Zusammenarbeit mit der SMS Siemag AG in Düsseldorf (Abteilung Komponentenentwicklung) erstellte.
Herr Scholz erhielt den Preis für seine Masterarbeit „A procedure for continuously differentiable muscle wrapping over many bodies for musculoskeletal simulation”, welche er an der Stanford University anfertigte.
Zudem wurden Herr Jürgens und Herr Scholz bei der diesjährigen Absolventenfeier der Fakultät für Ingenieurswissenschaften für ihre hervorragenden Studienabschlüsse ausgezeichnet.
Herr Scholz wurde für den besten Studienabschluss im Mastersudiengang Maschinenbau ausgezeichnet. Herr Jürgens erhielt eine Auszeichnung für den besten Studienabschluss im Diplomstudiengang Maschinenbau.
Juli 2012 Bester Studienabschluss ausgezeichnet
Unser Mitarbeiter Julian Hoth wurde bei der diesjährigen Absolventenfeier der Fakultät für Ingenieurwissenschaften für den besten Studienabschluss im Studienprogramm "International Studies in Engineering" ausgezeichnet.
Januar 2012 BMBF-Förderung – Fehlertolerante Strömungsberechnungen auf Supercomputern
Am Lehrstuhl für Mechanik und Robotik, der Fakultät für Ingenieurswissenschaften der Universität Duisburg-Essen wird in der Arbeitsgruppe um Prof. Dr.-Ing. W. Kowalczyk aktiv an dem vom Bundesministerium für Bildung und Forschung (BMBF) geforderten Kooperations-Projekt: "FEToL - Eine fehlertolerante Umgebung für peta-scale MPI-Löser " geforscht und gearbeitet. Das Projekt ist Teil des BMBF-Calls "HPC-Software für skalierbare Parallelrechner". Unter der Projektkoordination der Technischen Universität Carolo-Wilhelmina zu Braunschweig steht den Hochschulpartnern Regionales Rechenzentrum Erlangen (RRZE) der Friedrich-Alexander-Universität Erlangen-Nürnberg, Höchstleistungsrechenzentrum Stuttgart (HLRS) Universität Stuttgart und UDE, sowie den Industriepartner NEC Deutschland GmbH, Plattform Computing GmbH (an IBM Company) über die Laufzeit von 3 Jahren ein Gesamtbudget von 2,7 Mio. € zur Verfügung.
Der Einsatz von High-Performance und High-End Computing (HPC und HEC) ist bereits zum Standard in vielen Bereichen der Wirtschaft und Wissenschaft geworden. Robuste und stabile HPC-Umgebungen stellen heutzutage die Grundlage zur Lösung der wichtigsten wissenschaftlichen und technischen Problemstellungen dar, dennoch werden bei wachsender Größe und Komplexität solcher HPC-System die Auswirkungen von Fehlern und Ausfällen von hard- und softwarespezifischen Systemkomponenten immer gravierender.
Ziel des FEToL-Projektes (www.fetol.org) ist die effektive und ressourceneffiziente Erhöhung der Ausfallsicherheit von HEC-Systemen durch einen geeigneten Softwareansatz. Dieser Ansatz muss den Verlauf massiv paralleler Berechnungen mit hohen Laufzeitanforderungen auch bei auftretenden Systemfehlern und -störungen effizient und dynamisch sicherstellen.
Die UDE als FEToL-Projektpartner ist hierbei maßgeblich für die Entwicklung von Schnittstellen zwischen der fehlertoleranten Umgebung und der Applikation, die open source CFD-Software OpenFOAM für die numerische Berechnungen und Simulation von Strömungen mittels Finite-Volumen-Methode (FVM), verantwortlich. Konkrete Anwendungen der OpenFOAM-Software und der entwickelten Schnittstellen finden sich unteranderem in der Modellierung und Simulation von komplexen biofluidmechanischen Mehrphasen-Strömungen im Bereich des vaskulären Systems und der Wasseraufbereitung, sowie in der theoretischen Untersuchung von strömungsakustischen Phänomenen.

Dezember 2011 Stifterverband für die Deutsche Wissenschaft - Stiftungsprofessuren
Der Stifterverband stellt das Portrait der Professur für Biomechanik am Lehrstuhl für Mechanik und Robotik an der UDE in seiner Zeitschrift "Wirtschaft und Wissenschaft Heft 4/2011" dar. Die Stiftungsjuniorprofessur wird finanziert vom Stifterverband für die Deutsche Wissenschaft aus Mitteln der Claussen-Simon-Stiftung.

Dezember 2011 Den Hüftkopf erhalten – Forschungsprojekt verbindet Mediziner und Ingenieure
Das Bundeswirtschaftsministerium fördert das Vorhaben mit 175.000 Euro. Kooperationspartner sind Priv.-Doz. Dr. Stefan Landgraeber von der Orthopädischen Universitätsklinik Essen unter der Leitung von Prof. Dr. Marcus Jäger und Prof. Dr. Wojciech Kowalczyk vom Lehrstuhl für Mechanik und Robotik der UDE. Zusammen mit einem industriellen Kooperationspartner sollen Instrumente zur minimal-invasiven Behandlung von Knochenschädigungen entwickelt werden. Das mögliche Anwendungsspektrum umfasst neben Osteonekrosen auch die Diagnostik und Therapie gutartiger Tumore sowie Erkrankungen der Wirbelsäule. (weiter…)

November 2011 Wettbewerbserfolg für Forschungsarbeit - Rheinische Post
Neukirchen-Vluyn (s-g) Freude beim ITBB in Neukirchen-Vluyn: Das Unternehmen hat es bei einem Wettbewerb des NRW-Wisenschaftsministeriums unter die sieben Besten geschafft. Dabei ging es um "Die besten Ideen für die Personalisierte Medizin", der Wettberwerb lief under dem Kürzel "Per-Med.NRW". Hinter dem Kürzel ITBB verbirgt sich das "Institut für Technologien der Biomechanik und Biomaterialien". Zu dessen Gesellschaftern gehört auch Fußballstar Roque Santa Cruz aus Paraquay.
Die GmbH hatte gestern illustre Gäste in das Café der Kulturhalle Vluyn eingeladen, um den Erfolg angemessen publik zu machen. Roque Santa Cruz hatte allerdings die Teilnahme wegen einer Verletzung absagen müssen. ITBB Geschäftsführer, Prof. Andrés Kecskeméthy, erleuterte den Gästen, mit welchem Projekt das Unternehm aus Neukirchen-Vluyn sich beim Wettbewerb platzieren konnte.
Es handelt sich im die "Personalisierte Therapiestuerung bei Gangstörungen am Beispiel des Schlaganfalls". Das Stichwort dabei ist "Bewegungssimulation". Projektpatner sind die Universität Duisburg-Essen (Lehrstuhl für Mechanik und Robotik), die Heinrich-Heine-Universität Düsseldorf (Neurologische Klinik) sowie die Fachklinik Rhein-Ruhr für Herz- Kreislauf- und Bewegungssystem.
Zu den Gästen in Vluyn gehörten untern anderem Bürgermeister Harald Lenßen und der Europa-Abgeordnete Karl-Heinz Florenz (beide CDU). Letzterer zeigte sich erfreut, dass ein Unternehmen wie die ITBB deutlich mache, wie wertvoll eine Förderung durch die Europäische Union sei. Der Hintergrund: Das Fördergeld für den aktuellen Wettbewerb stammt unter anderem aus dem "NRW-EU-Ziel2-Programm". Leider stellten das nicht alle Institutionen, die von EU-Geldern profitierten, dies so klar heraus, sagte der Brüsseler Parlamentarier. Dabei sei dies ungemein wichtig, denn "nur so kann man Deutschland an der Spitze halten". Die Globalisierung sei "kein Sandkastenspiel". Harald Lenßen gratulierte den Vertretern der ITBB und versicherte die Stadt werde die Gewerbesteuern nicht erhöhen. Er hoffe, das das Unternehmen sich dauerhaft für den Standort Neukirchen-Vluyn entscheide: "Schließlich bauen wie gerade ein neues Gewerbegebiet".
Für die sieben Gewinner des Wettbewerbes, an dem 37 Konsortien mit 145 Einzelanträgen teilgenommen hatten, werden vom Land Nordrhein-Westfalen insgesamt 11,4 Millionen Euro Fördergelder bereitegestellt.
(Text: Rheinische Post)

August 2011 Compliant Mechanisms Award ‚Applications‘
Die American Society of Mechanical Engineers hat der Gruppe um Prof. Kecskeméthy den “Compliant Mechanisms Award” im Bereich “Applications” verliehen. Der Preis wurde für “A Novel Approach for Designing Parabolic Mirrors Using Optimized Compliant Bands” vergeben, welcher im August bei der 35th Mechanisms and Robotics Conference in Washington, DC präsentiert wurde.
Mai 2011 7. Jahrestagung der Deutschen Gesellschaft für Biomechanik (3. Posterpreis)
Die Deutsche Gesellschaft für Biomechanik (DGfB) verleiht an die Gruppe um Prof. Kowalczyk den 3. Posterpreis anlässlich der 7. Jahrestagung der DGfB in Murnau 2011 für den Beitrag „PIV investigation of sutureless aortic valve prostheses – ATS 3F Enable“. Diese Arbeit wurde gemeinsam mit der Klinik für Thorax- und Kardiovaskuläre Chirurgie des Westdeutschen Herzzentrums Essen durchgeführt.