Muscle Wrapping Project
Fast Multi-Obstacle Muscle Wrapping Using Natural Geodesic Variations
Overview
The goal of this project is the development of a fast and accurate method for computing shortest musculotendon paths across multiple, biologically realistic wrapping surfaces in musculoskeletal models.
Background
Musculoskeletal simulation has become an essential tool for understanding human locomotion and movement disorders. Muscle-actuated simulations require methods that continuously compute musculotendon paths, their lengths, and their rates of length change to determine muscle forces, moment arms, and the resulting body and joint loads. Musculotendon paths are commonly modeled as locally length minimizing curves which wrap frictionlessly over moving obstacle surfaces representing bone and tissue. Biologically accurate wrapping surfaces are complex and a single muscle path may wrap around many obstacles. However, state-of-the-art muscle wrapping methods are either limited to analytical results for a pair of simple surfaces, or they are computationally expensive. As a result, biomechanists face a trade-off between the computational speed and the accuracy of their models.
Method
The shortest muscle path is considered as a concatenation of straight-line segments which have to connect collinearly to geodesic segments on the wrapping surfaces. The collinearity conditions are used to formulate a global path-error constraint equation, whose root is computed iteratively to find the shortest path. Excellent computational efficiency is achieved by (1) parameterizing each geodesic by its starting point, direction, and length; (2) using four natural, i.e., independent, variations of the parameters of each geodesic; and (3) completely taking advantage of the differential geometric relationships between the natural geodesic variations and the resulting path-error variations. Thereby, the shortest-path problem can be solved very fast without nested loops by applying a gradient-based root-finding method, e.g., Newton's method, with an explicit banded Jacobian. Moreover, an explicit formula for the shortest path's exact rate of length change has been developed within this project.
Results
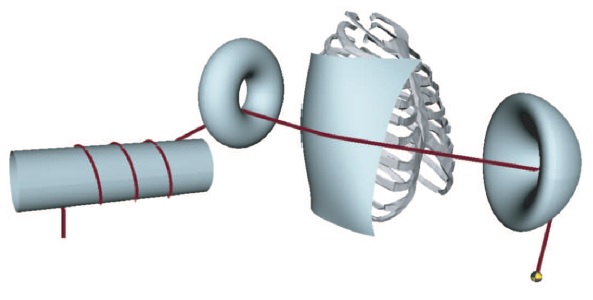
The developed Natural Geodesic Variation (NGV) method computes time-continuous, geometrically smooth, and high-precision solutions for the shortest path, its length, and its rate of length change. It can work with nonsimple surfaces that fit the complex geometry of biological wrapping surfaces. The figure below shows an example simulation where the shortest muscle path was computed across a surface patch fitted to a human ribcage.
The computational costs of the NGV method grow linearly with the number of wrapping surfaces. It can accurately simulate shortest muscle paths across hundreds of wrapping surfaces in real time.

By its general formulation, the NGV method can work with both parametric and implicit surfaces.Future extensions will allow for the simulation of path lift off an touchdown.
Associated publications
- A. Scholz, M. Sherman, I. Stavness, S. Delp, A. Kecskeméthy. Computation of shortest musculotendon paths using natural geodesic variations. ECCOMAS Multibody Dynamics Conference, Barcelona, Spain, June 29 - July 02, 2015.
- A. Scholz, M. Sherman, I. Stavness, S. Delp, A. Kecskeméthy. Simulating Shortest Musculotendon Paths Across Multiple Biologically Accurate Wrapping Surfaces In Real Time. International Society Of Biomechanics, Glasgow, Scotland, July 12-16, 2015. (oral presentation).
- A. Scholz, M.Sherman, I. Stavness, S. Delp, A. Kecskeméthy. A Fast Multi-Obstacle Muscle Wrapping Method Using Natural Geodesic Variations. Journal of Multibody System Dynamics (Springer), 2015.
- A. Scholz, I. Stavness, M. Sherman, S. Delp, A. Kecskeméthy. Computing Musculotendon Paths and Their Velocities Across Multiple Moving Surfaces Using Jacobi Fields. ECCOMAS Multibody Dynamics Conference, Zagreb, Croatia, July 01-04, 2013.
- A. Scholz, I. Stavness, M. Sherman, S. Delp, A. Kecskeméthy. Improved Muscle Wrapping Algorithms Using Explicit Path-Error Jacobians. 6th International Workshop on Computational Kinematics, Barcelona, Spain, May 12-15, 2013.
- A. Scholz, I. Stavness, M. Sherman, S. Delp, A. Kecskeméthy. Analytical Determination of Path-Error Jacobians Using Jacobi Fields for Muscle Wrapping Acrosss Multiple Moving Surfaces. 84th Annual Meeting of the International Association of Applied Mathematics and Mechanics, Novi Sad, Serbia, March 18-22, 2013.