Scaling Methods
|
Area: |
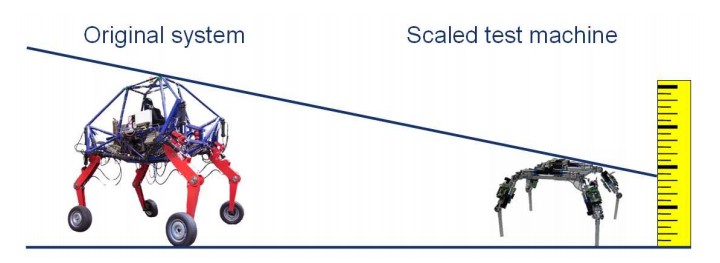
Scaled models for walking machines |
|
Person in charge: |
Cem Kara, Christian Sturm, Lawrence Louis |
|
Duration: |
2006 – 2009 |
One must expend great effort to ensure the geometrical or mechanical similarity of models during the scaling of complex systems. By using the example of walking gaits of quadruped walking machines, it is to be shown how the functional evaluation without adherence to classical similarity measures can be successful. It is necessary to keep the area of the work space for an individual leg of the small scaled proportional to that of a large scaled leg. If this is achieved, then the feasibility of identical gaits can be guaranteed with suitable algorithms.