Walking Machines
| Area: | Generation of walking gaits and optimization regarding different criteria for quadruped walking robot ADONIS |
| Person in charge: | Cem Kara |
| Duration: | 2006 – 2010 |
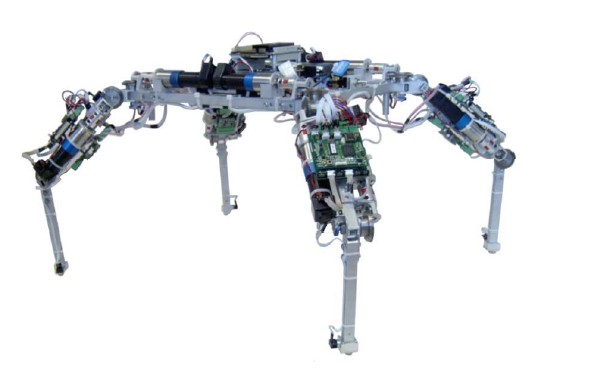
Walking machines can be divided into two categories: static and dynamic. There are different kinds of walking gaits for the quadrupeds, such as Crawl Gait (static) or Bound Gait (dynamic). ADONIS is a scaled
down, four-legged, static walking machine. Since there are many styles of walking gates we will test and compare them (the free Gait, Crawl gait, Wave gait, etc.). In order to regulate an optimal gait for the ADONIS, data related to three important criteria, i.e. stability, speed and energy consumption, will compared.