Entwicklung eines Seilroboters
Entwicklung eines Seilroboters für die Erstellung von Kalksandstein-Mauerwerk
Im Rahmen der fortschreitenden Digitalisierung weist das Bauwesen einen geringen Automatisierungsgrad auf und sieht sich gleichzeitig einem Fachkräftemangel bei zunehmender Anzahl an Aufträgen ausgesetzt. In einer Kombination aus Building Information Modeling (BIM) und der Robotik wird eine Lösung des Problems gesehen.
In einem gemeinsamen Forschungsprojekt haben der Lehrstuhl für Mechatronik und das Institut für Baubetrieb und Baumanagement der Universität Duisburg-Essen, zusammen mit der Forschungsvereinigung Kalk-Sand e.V. und dem IAB – Institut für Angewandte Bauforschung einen Seilroboter zur automatisierten Erstellung von Kalksandstein-Mauerwerk entwickelt und realisiert. Hierbei war das IBB unter anderem für den Entwurf eines geeigneten Gebäudegrundrisses zuständig. Dabei musste insbesondere die schichtweise Erstellung des Mauerwerks in der Ebene berücksichtigt werden, da der Roboter nicht mit konventionellen Verfahren vorgehen kann. Des Weiteren sollte das Schneiden von Steinen möglichst vermieden werden, um einen optimalen Ablauf zu erzeugen. Aus diesem Grund wurde weiterhin an einer Steinzerlegungssoftware gearbeitet, sodass es möglich ist aus einem bestehenden BIM Modell automatisiert eine Steinzerlegung mit Steinliste zu generieren und dabei gleichzeitig alle Anforderungen des Roboters zu berücksichtigen.
Der konstruierte Seilroboter ist vergleichbar mit einer Kamera, die über dem Spielfeld in Fußballstadien schwebt. Mit Seilen an einem Stahlrahmen befestigt, kann der Roboter eigenständig Mauersteine aufnehmen, Mörtel auftragen und die Steine vollautomatisch absetzen.
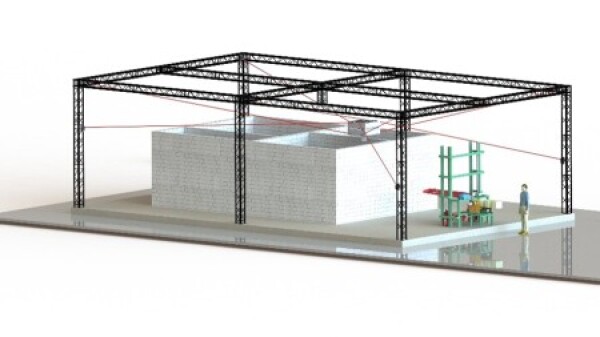
[Quelle: Lehrstuhl für Mechatronik]
Zum Projektende wurde der Seilroboter Ende Oktober 2021 in Duisburg in Anwesenheit von Fachverbänden, dem Dekan der Ingenieurwissenschaften und Auszubildenden des Maurerhandwerks sowie Pressevertretern vorgestellt (siehe Video unten). Anschließend wurde in einer offenen Diskussion über das zukünftige Berufsbild des Maurers gesprochen, welches sich durch den Einsatz von automatisierten Verfahren weitgehend ändern wird. So erleichtert der Roboter die Arbeit der Maurer, indem er die Hebeprozesse übernimmt und führt gleichzeitig zu einem deutlich geringeren Personalbedarf sowie einer verkürzten Bauzeit.
Aufgrund der vielversprechenden Ergebnisse soll das abgeschlossene Projekt nun weiterentwickelt werden, sodass der Seilroboter beispielsweise auf einer realen Baustelle erprobt werden kann.
Video des Seilroboters (veröffentlicht vom Ministerium für Heimat, Kommunales, Bau und Gleichstellung des Landes Nordrhein-Westfalen):
Innovation made in NRW: Maurer-Roboter vorgestellt
Projektbetreuerin am Institut für Baubetrieb und Baumanagement:
Beteiligte Lehrstühle/Abteilungen an der UDE:
- Institut für Baubetrieb und Baumanagement (Prof. Malkwitz)
- Lehrstuhl für Mechatronik (Prof. Schramm)
Projektpartner:
- Forschungsvereinigung Kalk-Sand eV (Dr.-Ing. Wolfgang Eden)
- Institut für Angewandte Bauforschung Weimar gGmbH (Dr.-Ing. Ulrich Palzer, Dr.-Ing. Barbara Janorschke)

Veröffentlichungen:
Bruckmann, T.; Mattern, H.; Spengler, A.; Reichert, C.; Malkwitz, A.; König, M.: Automated construction of masonry buildings using cable-driven parallel robots. In Proceedings of 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), 2016.
Mattern, H.; Bruckmann, T.; Spengler, A.; König, M.: Simulation of automated construction using wire robots. In: Roeder T. M. K.; Frazier, P. I.; Szechtman, R.; Zhou, E. ; Huschka, T.; Chick, S. E., Hrsg., Proceedings of the 2016 Winter Simulation Conference, Seiten 3302–3313, 2016.
Bruckmann, T.; Spengler, A.; Karl, C.K.; Reichert, C.; König, M.: Process Analysis of Cable-Driven Parallel Robots for Automated Construction. In: Ottaviano, E.; Pelliccio, A.; Gattulli, V.: Mechatronics for Cultural Heritage and Civil Engineering, Springer Intelligent Systems, Control and Automation: Science and Engineering Bookseries, 2017
Roske, T., Lipowsky, J., Palzer, U., Eden, W., Schäfers, M., Lemmen, P., Heidel, R., Boumann, R., Spengler, A. and Bruckmann, T. (2021), Automatisierter Bau von Kalksandstein-Mauerwerk mit Seilrobotern. Mauerwerk, 25: 82-89. https://doi.org/10.1002/dama.202110011
Bruckmann, T.; Reichert, C.; Meik, M.; Lemmen, P.; Spengler, A.; Mattern, H.; König, M.: Concept Studies of Automated Construction Using Cable-Driven Parallel Robots. In: Gosselin, C.; Cardou, P.; Bruckmann, T.; Pott, A. (Hrsg.): Cable-Driven Parallel Robots (Proceedings of the Third International Conference on Cable-Driven Parallel Robots), Springer Verlag, ISBN: 978-3-319-61430-4, 2018
Malkwitz, A.; Spengler, A.; Bruckmann, T. (2019), Baubetriebliche Untersuchung von Robotersystemen im Mauerwerksbau. Bautechnik, 96 (5): 375-379