SEEROAD
Sensorsystem zur autonomen Fahrbahnzustandserkennung (SEEROAD)
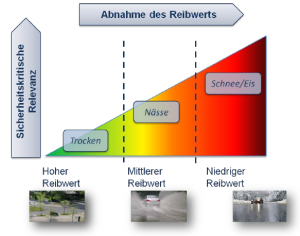
Das Ziel des Vorhabens ist es, der automatisierten Fahrzeugsteuerung zu jedem Zeitpunkt die aktuellen Werte der Haftreibung des Fahrzeugs auf der Straße zur Verfügung zu stellen. Mit diesen Informationen soll insbesondere bei anspruchsvollen Fahrmanövern, bei denen ein Übergang zum teilweise oder vollständig automatisierten Fahren erfolgt, eine höhere Sicherheit für die Insassen gewährleistet werden. Insbesondere, wenn in diesen Fahrsituationen ein unvermitteltes Eindringen von Wild, Personen oder Kindern in den Straßenverkehr erfolgt, ist ohne Kenntnis des Fahrbahnzustandes ein sicheres Fahr- oder Ausweichmanöver und die sichere automatische Fahrzeugführung in den beschriebenen Fahrsituationen nicht zu gewährleisten.
Die Aufgabe dieses Projektes besteht darin, aus neuen und innovativen Umfeldsensoren in Verbindung mit der Datenfusion aus vorhandenen Sensoren der Fahrzeuge den Fahrbahnzustand derart zu bestimmen, dass eine qualifizierte Schätzung des aktuellen Reibwertes möglich ist.
Der Projektumfang liegt bei ca. 2 Mio. € und basiert auf der Bekanntmachung zur Förderung von Forschungsgebieten auf dem Gebiet „Hoch- und vollautomatisiertes Fahren für anspruchsvolle Fahrsituationen“.
Projektlaufzeit:
36 Monate (03/2017 bis 02/2020)
Projektbearbeiter am Lehrstuhl für Mechatronik:
Projektpartner:
- Hella Fahrzeugkomponenten GmbH, Bremen
- Dr. Ing. h.c. F. Porsche AG, Weissach
- Intedis GmbH & Co. KG, Würzburg
- Universität Bremen, ITEM
beteiligte Lehrstühle/Abteilungen an der UDE:
- Lehrstuhl für Mechatronik (Prof. Schramm)
Zugehörigkeit zu Profilschwerpunkten der Fakultät für Ingenieurwissenschaften an der UDE:
Weitere Informationen: demnächst